Die kommerzielle Nutzung dieses Inhalts ist strengstens untersagt. Weitere Details zur Lizenzrichtlinie finden Sie auf der Seite Über uns.
1. Vektoralgebra
Wir werden sehr einfache Operationen vernachlässigen.
1.1 Dreifachprodukte:
1.2 Nabla-Operator:
Für einen Einheitsvektor bedeutet Differentiation, wie sich ändert,
wenn um einen infinitesimalen Betrag zunimmt.
Das heißt
Kartesische Koordinaten:
Kugelkoordinaten:
Und ähnlich für andere.
Basierend auf diesen Tabellen können wir ableiten:
Gradient:
Divergenz:
Zur Wiederholung:
Gradient:
Divergenz:
Rotation (Curl):
Laplace:
1.3 Eigenschaften von Nabla-Operatoren
Bew.
Da analytisch ist, sind gemischte partielle Ableitungen gleich.
Daher .
Bew.
Bew. Betrachten Sie nur eine Komponente (andere sind zyklisch).
Dasselbe gilt für andere Komponenten, und wenn sie zusammengefügt werden, ist es bewiesen.
Bew. Betrachten Sie nur eine Komponente (andere sind zyklisch).
Dasselbe gilt für andere Komponenten, und wenn sie zusammengefügt werden, ist es bewiesen.
Bew.
Wir haben die Dreifachproduktformel: .
Ersetzen Sie diese Vektoren durch und .
Wir müssen erklären.
In diesem Term sollten Sie nicht als gewöhnlichen Vektor betrachten und dies ist kein gewöhnliches numerisches Produkt.
Stattdessen ist ein Operator, der auf den Skalar wirkt.
Mit dem Operatorverständnis wird es einfach zu interpretieren, warum es zu einem Gradientenoperator anstelle eines gewöhnlichen Produkts wird.
Differentialoperatoren erfordern eine Funktion, auf die sie wirken. Der Nabla-Operator wirkt immer auf die Funktion zu seiner Rechten.
Bew.
Ähnlich wie dieser Prozess:
Dasselbe gilt:
Bew.
Weil
dann
Separat vereinfachen Sie die vier Terme:
Schließlich
Bew.
Ähnlich für .
Entfernen Sie schließlich alle und fügen Sie die Ergebnisse von A und B zusammen.
Die Formel wird bewiesen sein.
Bitte beachten Sie, dass hier ein dyadischer Tensor ist, kein Gradient.
Bew.
Bew.
Bew.
Die Komponenten
Nehmen Sie die Divergenz
Fügen Sie sie zusammen, dann
1.4 Dyadischer Tensor
Dies ist tatsächlich das Tensorprodukt. Der Endraum ist
Das Ergebnis ist ein Tensor zweiter Ordnung.
Zur Interpretation in Komponenten:
1.5 Levi-Civita-Symbol
Dann
1.6 Zwei Theoreme
Satz: Wenn , dann existiert , sodass
Bew.
Angenommen .
Da , aber .
Dann für . Existieren 2 Terme .
.
Satz: Wenn , dann existiert , sodass .
Bew.
1.7 Anwendungsbeispiele
Wir bieten hier einige Anwendungsbeispiele an:
da
Dann
(Dyade)
Da
Dann
(Dyade)
Da dann
2. Statisches elektrisches Feld
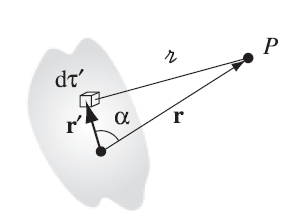
2.1 Feld und Potential
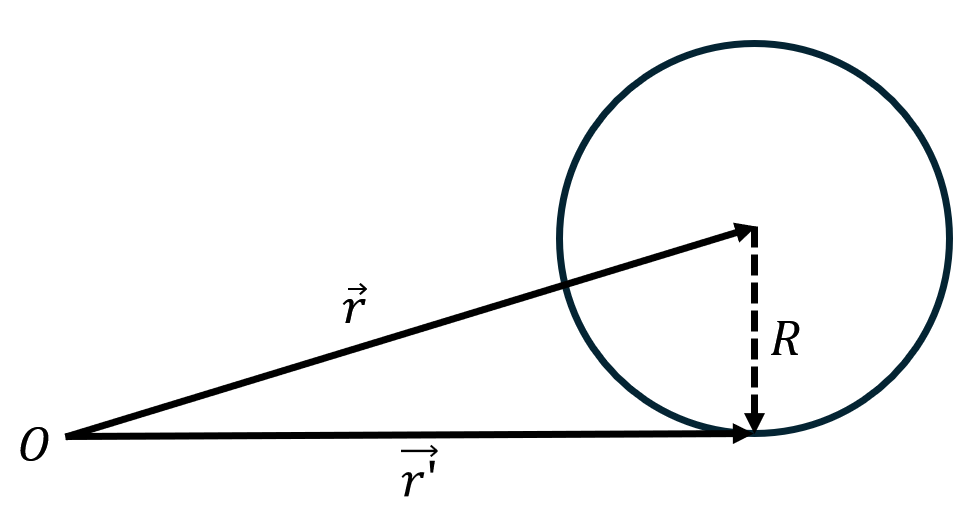
Beachten Sie, dass die absolute Position des Messpunktes ist, während die Position der Ladungen ist.
Die obige Formel kann in kompakter Form geschrieben werden.
wobei
als elektrisches Potential definiert ist, welches ein skalares Potentialfeld ist.
Beachten Sie, dass nicht auf operiert, da den Raum operiert. Für ein kleines Feld
ist ein konstanter Vektor (fixierte Ladung).
Als nächstes können wir die Rotation und Divergenz berechnen:
Nehmen Sie ein beliebiges Volumen, das einschließt.
Bei ist , aber das Integral ist endlich. Daher .
Schließlich erhalten wir
Aus den obigen Ableitungen können wir einige wichtige Schlussfolgerungen ziehen.
Poisson-Gleichung für statisches Feld:
Das statische elektrische Feld hat eine Quelle, aber keine Rotation.
Weiter gibt es das Earnshaw-Theorem.
Earnshaw-Theorem: Ein Punktladung kann sich in einem statischen elektrischen Feld nicht in einem stabilen Gleichgewicht befinden.
Bew. stabiles Gleichgewicht .
Jedoch , es gibt einen Konflikt.
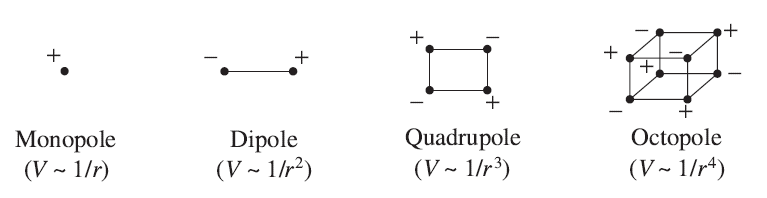
2.2 Multipolentwicklung
Wenn Sie sich sehr weit von einer lokalisierten Ladungsverteilung entfernen, kann diese, wenn , als Punktladung angenähert werden. Aber wenn , muss die Ladungsverteilung zur Präzisierung als Multipol entwickelt werden.
Verschiedene Multipole
Wir leiten nun das Potential von Multipolen her. An einem bestimmten Punkt ist das Potential gegeben durch
Unter Verwendung des Kosinussatzes.
Definieren Sie , dann .
Feld einer Ladungsverteilung
Wenden Sie die Taylor-Entwicklung an
Setzen Sie in die Entwicklung ein,
Überraschenderweise sind die Koeffizienten der -Terme Legendre-Polynome. Wir schließen daraus:
Die Terme in der obigen Entwicklung zeigen die Beiträge der Multipole.
Der Term ist der Monopolbeitrag. Der Term ist Dipol, Quadrupol, Oktupol usw.
Normalerweise wird die Entwicklung vom Monopol dominiert, der nur eine Punktladung ist.
Wenn , wird der dominante Term der Dipol sein,
Wir definieren
als das Dipolmoment. Der Dipolbeitrag vereinfacht sich zu
Im Allgemeinen, wenn Sie den Ursprung des Koordinatensystems verschieben, ändert sich ebenfalls.
Das Feld eines Dipols ist
Wir können auch den Beitrag von Quadrupolen extrahieren.
Die beiden Integrale können zu einem Term kombiniert werden.
Der Quadrupolmoment-Tensor ist definiert als
Offensichtlich ist , daher ist , dies ist ein symmetrischer Tensor.
Es ist einfach zu verifizieren, dass spurlos ist.
Um eine kompaktere Form zu erhalten, erweitern Sie mit einer kompakteren Form der Taylor-Entwicklung.
Im statischen Potential
Der Beitrag des Quadrupoles
Für den Operator,
Setzen Sie diesen Term in ein.
wobei
Das elektrische Feld, das von einem Quadrupol erzeugt wird, ist:
Betrachten Sie .
Berechnen Sie zuerst den Gradienten der quadratischen Form
Dann
Wenn ein Quadrupol im externen elektrischen Feld platziert wird, sollte die Energie sein
Monopol (Gesamtladung) und Dipol eines Quadrupoles sind beide 0. Daher bleibt nur ein Term übrig.
Erinnern Sie sich an die Potentialentwicklung mit Legendre-Polynomen:
Das Legendre-Polynom kann weiter mit Kugelflächenfunktionen erweitert werden:
Setzen Sie die Entwicklung in das Potential ein und ordnen Sie sie neu an:
Und Multipole können definiert werden:
sind die Elemente des -Pol-Tensors .
2.3 Eindeutigkeitssatz für statische elektrische Felder
Angenommen, ein statisches System besteht aus mehreren Bereichen mit homogenem Medium oder Leitern.
Wir kennen die Ladungsverteilung ,
Gesamtladung oder Potential ,
und das Potential der Grenze oder seine Ableitung in normaler Richtung ,
dann ist das Feld eindeutig.
Dies ist der Eindeutigkeitssatz.
Bew.
Angenommen, es gibt zwei Potentiale: , .
Betrachten Sie zwei Bereiche nebeneinander.
Wir haben:
und
Definieren Sie ein differentielles Potential
Dann erfüllt das differentielle Potential
Betrachten Sie die vom differentiellen Potential enthaltene Energie:
Zwischenzeitlich
Der zweite Term entfällt aufgrund der Poisson-Gleichung.
Dann
Betrachten Sie nun zwei Arten von Randbedingungen.
Wenn gegeben ist, dann ist an der Grenze,
daher ;
Wenn gegeben ist, dann ist an der Grenze,
daher .
Dann ist der Satz bewiesen.
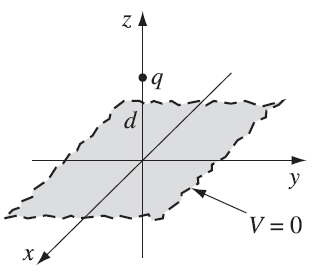
2.4 Methode der Spiegelbilder
Angenommen, eine Punktladung wird über einer unendlich großen, geerdeten Ebene platziert.
Anfangskonfiguration
Das System erfüllt zwei Bedingungen:
Diese Bedingungen geben tatsächlich die Randbedingung. Basierend auf dem Eindeutigkeitssatz gibt es nur eine Lösung, wenn die Randbedingungen erfüllt, unabhängig von der Ladungsverteilung.
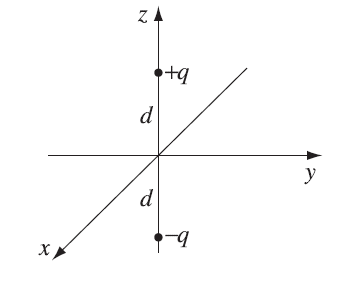
Zur Vereinfachung kann eine andere Konfiguration die gleichen Randbedingungen erreichen.
Neue Konfiguration
Eine weitere bei und keine Ebene. Diese Ladung wird als Spiegelbildladung bezeichnet. In dieser Konfiguration ist das Potential bei
Dieses ist dasselbe wie die Konfiguration mit der Ebene.
Es ist unterschiedlich bei , aber das kümmert niemanden.
Ein solches Potential ist ein kombinierter Beitrag von sowohl der Ladung als auch der induzierten Ladung .
Die induzierte Ladungsdichte auf der Ebene ist
Die Kraft ist
Energie in diesem System
Zur Wiederholung ist die Essenz der Spiegelbildmethode der Eindeutigkeitssatz.
Es gibt ein weiteres Beispiel.
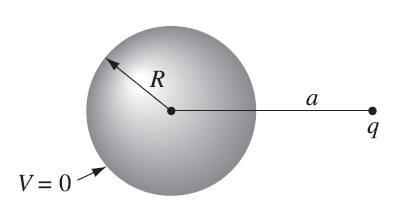
Kugel zur Anwendung der Spiegelbildladung
Wir versuchen, zu verwenden, um die induzierte Ladung auf der Kugel zu ersetzen.
Um die Randbedingung zu erfüllen, muss die Spiegelbildladung sein
Da , muss es eine Konstante sein, muss ebenfalls konstant sein.
Wir können wählen
Sie können definitiv andere Werte wählen, aber dieser Wert stimmt mit der Intuition überein.
2.5 Green-Funktions-Methode
Diese Methode ist in der Praxis besser als die Spiegelbildmethode.
Betrachten Sie ein allgemeines Problem,
das Potential erfüllt die Poisson-Gleichung
Um diese Gleichung zu lösen, machen wir einige Vorbereitungen.
Geben Sie zwei Gleichungen an:
wobei eine beliebig gewählte Hilfsfunktion ist.
Die beiden Gleichungen werden als Greens erste Formel bezeichnet,
die aus der Gauß-Formel abgeleitet werden kann
Weiter subtrahieren Sie die beiden Greens ersten Formeln:
Dies wird als Greens zweite Formel bezeichnet.
Wählen Sie
Wir haben
dann
Ordnen Sie es neu an, wir erhalten die Poisson-Formel
Aber die Wahl dieser Hilfsfunktion hat einen Nachteil:
Schauen Sie sich den zweiten und den dritten Term an,
wenn wir das Gesamtpotential wissen wollen,
müssen wir das Potential und seinen Gradienten an der Grenze kennen,
aber in den meisten Fällen kennen wir nur eines davon.
Wählen Sie
Setzen Sie in die zweite Greensche Funktion ein
Wir haben
Wenn die Randbedingung
gegeben ist, dann
ist eine notwendige Bedingung für die Lösbarkeit der Poisson-Funktion. Wenn diese Bedingung nicht erfüllt ist, können Sie kein Potential finden, das alle gegebenen Bedingungen erfüllt. Das System existiert nicht.
Eine weitere wichtige Vorbereitung ist der Mittelwertsatz. Betrachten Sie eine sphärische Oberfläche
Das Potential im Zentrum ist
Dieses Ergebnis zeigt den Mittelwertsatz. Das Potential im Zentrum ist gleich dem mittleren Potential auf der Oberfläche der Kugel.
Nun ist es an der Zeit, einige dominante Probleme zu ermitteln.
Gegeben Poisson-Funktion und Randbedingung.
Nehmen Sie eine Hilfsfunktion, die erfüllt
Einsetzen und (Gradient von an der Oberfläche wird eliminiert, da )
Ordnen Sie es neu an
Da eindeutig durch die Gleichung und die Randbedingung bestimmt ist,
ist ebenfalls bekannt.
Wir müssen also den Gradienten vor der Lösung nicht angeben.
Tatsächlich wird die Hilfsfunktion als Green-Funktion bezeichnet.
Ein weiterer Typ von Randbedingung ist die Angabe des Gradienten (normale Ableitung).
Versuchen Sie auch, eine Hilfsfunktion zu nehmen, die erfüllt
Jedoch,
diese Green-Funktion wird die Lösung eliminieren,
da das Potential nur dann eine Lösung haben kann, wenn
Wenn ,
ist das Potential lösbar, wenn und nur wenn das System ein Vakuum ist, d.h. keine Ladung vorhanden ist.
Um es in jedem Fall lösbar zu machen,
wird die Green-Funktion modifiziert als
Einsetzen mit dieser Bedingung
Ordnen Sie es neu an
wobei das mittlere Potential an der Grenze ist.
3. Statisches Magnetfeld
3.1 Feld und Potential
Um die Richtung des Stroms anzuzeigen, können wir die Stromdichte definieren.
Nach Ladungserhaltung gilt in einem geschlossenen Volumen:
Dann
Es gibt ein experimentelles Gesetz: das Biot-Savart-Gesetz.
Biot-Savart-Gesetz: Für zwei Stromelemente und ist die Kraft zwischen ihnen
Und die magnetische Flussdichte
Weiterhin wird in kompakter Form dargestellt.
Ähnlich wie beim elektrischen Feld können wir ein Potential für das Magnetfeld definieren. Aber ist ein Vektor.
Weiterhin wird untersucht.
Für jede Funktion gilt:
Daher
und
Für den ersten Term gilt aufgrund von
Dieser Term umfasst den gesamten Raum, daher können wir eine Kugel mit
wählen.
Da für unendlich weit entfernte Punkte, kollabiert der erste Term zu 0.
Währenddessen gilt (keine Ladung hier), daher
Für den zweiten Term gilt:
Schließlich
3.2 Lorentz-Kraft
Unter allen Inertialsystemen nimmt die Lorentz-Kraft die gleiche Form an.
Für Strom gilt:
Im Allgemeinen ist die Stromdichte proportional zur Kraft pro Ladungseinheit: ist die Lorentz-Kraft (in 2.3 erwähnt). Einsetzen der Kraft ergibt: Normalerweise ist die Geschwindigkeit der Ladungen ausreichend gering, und der Term des Magnetfeldes kann vernachlässigt werden. wobei die Leitfähigkeit genannt wird. Diese Formel wird als Ohmsches Gesetz bezeichnet.
Es mag verwirrend sein, dass wir wissen, dass das elektrische Feld in einem Leiter 0 ist. Aber es gibt einen Strom im Inneren von Verbindungsdrähten aus Metall, was dem Ohmschen Gesetz zu widersprechen scheint. Diese Schlussfolgerung ist jedoch nur eine Annäherung. Die Leitfähigkeit eines Leiters ist so groß, dass nur ein sehr kleines Feld einen großen Strom treiben kann. Daher kann in den meisten Fällen, selbst wenn sich die Ladungen bewegen, das Feld im Inneren vernachlässigt werden.
3.3 Multipolentwicklung von Magnetfeldern
Ähnlich wie bei elektrischen Feldern kann das magnetische Potential ebenfalls mit Legendre-Polynomen entwickelt werden.
Was sich von der elektrischen Entwicklung unterscheidet, ist, dass der Monopolterm
verschwindet, da .
Dieses Ergebnis zeigt, dass das Magnetfeld keine Monopole hat,
was mit der Vorhersage von
übereinstimmt.
In Abwesenheit eines Monopolbeitrags
ist der dominante Term das Dipol
Aus der Stokesschen Formel gilt
Sei , wobei ein konstanter Vektor ist.
Daher
Einsetzen von ergibt
Und schließlich erhält man das Potential des magnetischen Dipols
wobei das magnetische Dipolmoment definiert ist als
Das Magnetfeld eines magnetischen Dipols ist
Der obige Beweis ist ein Spezialfall eines kleinen, dünnen Kreisstroms.
In allgemeinen Fällen
wird durch ersetzt.
Wenn ein magnetischer Dipol in ein externes Feld gebracht wird,
ist die Gesamtkraft darauf
Der erste Term ist immer Null, da kein Strom in oder aus dem Volumen fließt.
Wenn höhere Ordnungsterme vernachlässigt werden, gilt
Betrachten wir einen Tensor 3. Ordnung
und seine Divergenz
Da der Strom auf der Oberfläche Null ist und , gilt
Weiterhin gilt für :
Unter Verwendung der inversen Form von
können wir finden:
ist ein konstanter Vektor für einen Dipol.
Daher
Ebenso führt keine Stromänderung zu .
Mit ist auch die Energie klar.
Was zu klären ist, ist, dass
magnetische Effekte viel schwächer sind als elektrische Effekte.
Die Wirkung von magnetischen Dipolen ähnelt einem elektrischen Quadrupol.
Daher kümmern wir uns in den meisten Fällen nur um magnetische Dipole und ignorieren höhere Ordnungseffekte,
einschließlich magnetischer Quadrupole (deren Einfluss nahe an elektrischen Oktopolen liegt).
3.4 Eindeutigkeitssatz für statische Magnetfelder
Ähnlich wie bei der Elektrostatik hat auch das Magnetfeld einen Eindeutigkeitssatz.
Angenommen, es gibt einen konstanten Strom im System ,
.
Wenn die Stromverteilung, die Materieverteilung und die Tangentialkomponente von oder gegeben sind,
dann kann in diesem System eindeutig bestimmt werden.
Der Beweis ist ebenfalls ähnlich.
Angenommen, und erfüllen alle Bedingungen.
Dann gilt:
Definieren wir die Differenzgröße:
Offensichtlich gilt:
Wir erhalten die Energie des Differenzfeldes:
Das Differenzfeld enthält keine Energie,
was bedeutet, dass überall gilt.
Q.E.D.
4. Dynamisches Feld
4.1 Dynamisches elektrisches Feld
Faraday entdeckt, dass die Variation von ein elektromotorisches Potenzial erzeugt.
wobei der magnetische Fluss ist.
Wir können die Differentialform ableiten.
Wenn wir entfernen, erhalten wir
4.2 Dynamisches Magnetfeld
Wenn wir die Variation von berücksichtigen, werden wir einen Konflikt feststellen.
Aber nehmen wir die Divergenz auf beiden Seiten.
Das bedeutet , aber das ist in der Physik nicht zwingend erforderlich. Die Ladungserhaltung besagt, dass
Um diesen Konflikt aufzuheben, benötigen wir einen neuen Term.
Wir haben
dann
4.3 Maxwell-Gleichungen im Vakuum
Aus der obigen Ableitung können wir die Maxwell-Gleichungen zusammenfassen:
Beachten Sie, dass im letzten Integralterm der Term oft als geschrieben wird, wobei das elektrische Verschiebungsfeld ist. Ähnlich wird die integrale Gleichung des Magnetfeldes manchmal unter Verwendung der magnetischen Feldstärke anstelle von ausgedrückt, wobei im Vakuum gilt. Das Bild zeigt letzteres unter Verwendung von .
4.4 Vollständigkeit der Maxwell-Gleichungen
Vollständigkeit: Gegeben die Anfangs- und Randbedingungen sind die eindeutig bestimmt.
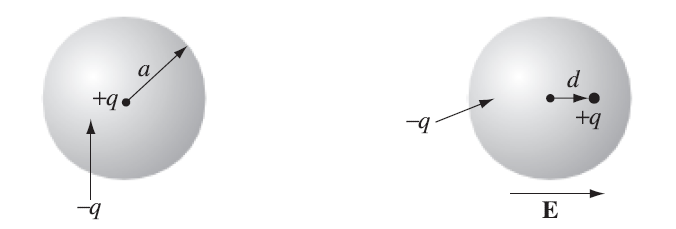
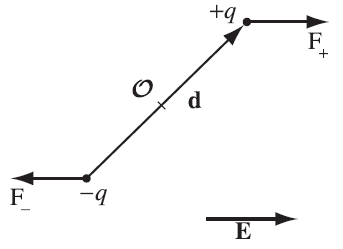
Ein Körper mit gleichen positiven und negativen Ladungen (total neutral) wird als Dipol bezeichnet. Wenn ein Dipol in platziert wird, wird er polarisiert.
Der Dipol hat ein Dipolmoment von:
wird Polarizierbarkeit genannt und hängt von der Struktur des Dipols ab.
Wenn der Abstand zwischen positiver und negativer Ladung beträgt, kann das Moment auch geschrieben werden als:
Die Richtung von ist von negativ nach positiv.
Betrachten wir als Beispiel ein polarisiertes Atom:
Polarisiertes Atom
Das von der negativen Ladung erzeugte Feld ist:
Die positive Ladung bleibt im Gleichgewicht stationär. Daher:
Die Polarizierbarkeit ist daher:
Bei komplizierteren Molekülen sind und möglicherweise nicht in der gleichen Richtung. Das wird als Tensor erweitert:
Wenn ein Objekt viele Dipole enthält, wird als makroskopische Polarisation definiert:
Das Potenzial wird:
wobei die Positionen des Feldpunkts und der Quelle sind.
Neu zuweisen:
Die beiden Terme sind getrennt das Potenzial, das von Oberflächen- und Volumenladung erzeugt wird. Daher
Wir haben keine freie Ladung berücksichtigt. Alle oben genannten Ladungen werden durch Polarisation erzeugt. Sie sind im Objekt gefangen und können sich nicht frei bewegen. Solche Ladungen werden gebundene Ladungen genannt.
5.4 Elektrische Verschiebung
Nun berücksichtigen wir freie Ladung.
Nach dem Gaußschen Gesetz:
Zur Vereinfachung definieren wir:
als die elektrische Verschiebung, dann vereinfacht sich das Gaußsche Gesetz:
In Integralform:
Für die Rotation (ohne zunächst):
Für viele Substanzen ist proportional zu :
Dann:
In einer anderen Sichtweise ändert sich die Permittivität mit der Substanz:
Wenn die Substanz nicht isotrop ist, ändert sich in verschiedenen Richtungen. Dann wird als Tensor erweitert:
Die Energie sollte sein:
5.5 Magnetisierung
Alle magnetischen Phänomene sind auf bewegte elektrische Ladungen zurückzuführen. Ähnlich wie bei der elektrischen Polarisation tritt bei Anlegen eines Magnetfeldes eine Nettoausrichtung von magnetischen Dipolen (erzeugt durch polarisierte Atome) auf, dann wird das Medium magnetisiert.
Die Magnetisierung ist nicht immer gleich dem externen . Einige sind parallel (Paramagneten), einige entgegengesetzt (Diamagneten). Wenige Substanzen behalten die Magnetisierung auch nach Entfernen des externen Feldes bei.
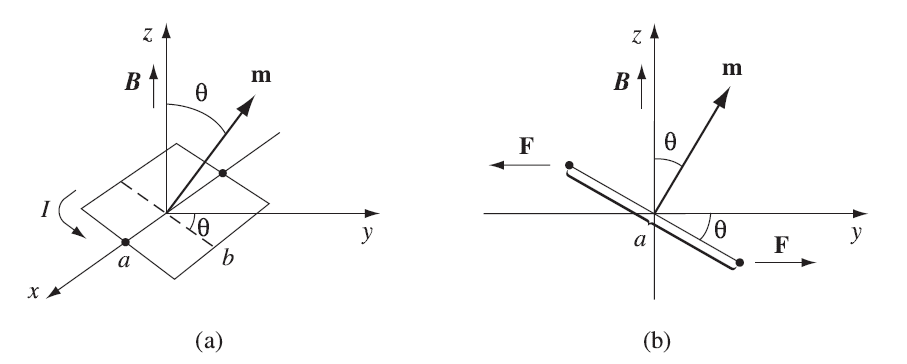
Ein magnetischer Dipol ist eine kleine Stromschleife. Das einfachste Beispiel ist ein rechteckiger Dipol.
Rechteckiger magnetischer Dipol
Das Drehmoment in einem homogenen Feld in z-Richtung:
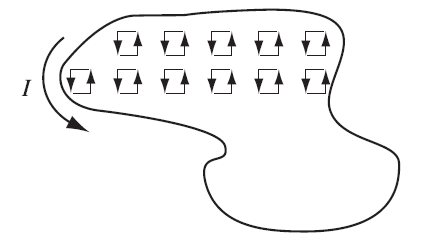
wobei der Normalenvektor der Dipolebene ist. Für nicht-rechteckige Dipole können wir die Fläche mit vielen rechteckigen Seiten füllen.
Benachbarte Seiten haben immer entgegengesetzten Strom, daher heben sie sich gegenseitig auf.
Die Seiten am Rand bilden die ursprüngliche Stromschleife. Dann kann das Drehmoment erweitert werden:
Nicht-rechteckiger Dipol
wobei , die Fläche ist.
Für ein Stromelement im ist die vom Feld ausgeübte Kraft:
Dann für einen makroskopischen Strom:
Für eine Stromschleife im homogenen Feld:
Im nicht-homogenen Feld, nehmen wir einen infinitesimalen kreisförmigen Drahtring mit Radius an, der einen Strom führt:
Daher die Energie:
Außerdem kommt es zum Dipolfeld und zur Störung.
Für eine Stromdichte :
In einem Dipol ist :
Da :
Und das Feld:
5.6 Makroskopische Magnetisierung
Für ein Objekt definieren wir:
als die Gesamtmagnetisierung. Mit ist das Potenzial des Objekts:
(aufgrund der Formel )
Der erste Term sieht aus wie der Effekt des Volumens:
Der zweite Term sieht aus wie der Effekt der Oberfläche:
Dann:
Die und sind gebundene Ströme im Volumen und an der Oberfläche.
Nun berücksichtigen wir den freien Strom:
Nach dem Ampèreschen Gesetz:
Definieren wir:
als Hilfsfeld, dann:
In Integralform:
Die Divergenz:
nur wenn , dann
Ähnlich wie beim elektrischen Feld ist immer linear zu :
Dann:
wird Permeabilität genannt, und wird Suszeptibilität genannt.
Wenn die Substanz nicht isotrop ist, wird immer als Tensor erweitert:
5.7 Maxwell-Gleichungen in Materie
Wir listen zuerst die Maxwell-Gleichungen im Vakuum auf:
In Materie werden und durch und ersetzt. Gemäß Kapitel 5 und Kapitel 6 wird das Gaußsche Gesetz ersetzt durch Das Ampèresche Schleifengesetz wird ersetzt durch
5.8 Randbedingungen
An der Grenze zwischen verschiedenen Substanzen sind nicht kontinuierlich.
Nehmen Sie einen dünnen Zylinder, der die Grenze kreuzt, mit einer Grundfläche und einer infinitesimalen Höhe . Nach dem Gaußschen Satz:
und
Und:
Nehmen Sie eine Ampère-Schleife mit infinitesimaler Breite und Länge , die die Grenze kreuzt.
Zuerst untersuchen wir diskrete Ladungsfälle. Für 2 Ladungen ist die Arbeit, um von unendlich weit weg an die Position zu bewegen (wobei der Ursprungspunkt ist), gegeben durch:
Fügen wir weitere Ladungen hinzu.
Die endgültige verrichtete Arbeit sollte die Summe aller Arbeiten sein.
Wiederholte Terme entfernen.
Wenn die diskreten Ladungen kontinuierlich werden, gilt:
wobei der Feldpunkt und die Position der Feldquelle ist.
Maxwell-Gleichungen anwenden.
Also:
Aber , also:
Wir integrieren über den gesamten Raum und unendlich weit weg ist .
Daher ist der erste Term:
Dann gilt:
6.2 Energie des Magnetfeldes
Angenommen, es gibt zwei ruhende Schleifen.
Lässt man einen konstanten Strom durch Schleife 1 fließen,
erzeugt diese ein Magnetfeld .
Das Biot-Savart-Gesetz liefert:
Das Magnetfeld ist proportional zum Strom .
Ebenso ist der Fluss durch Schleife 2 proportional dazu:
wird als gegenseitige Induktivität von Schleife 1 zu Schleife 2 bezeichnet.
Nun setzen wir das magnetische Potential ein:
Extrahieren wir :
Wir können ein erstaunliches Ergebnis finden:
Die Formel für ist symmetrisch bezüglich und .
Daher können wir sagen:
Wir lassen dann die Indizes weg und nennen beide .
Mit der Induktivität erzeugt das von Schleife 1 erzeugte Magnetfeld gemäß dem Faradayschen Gesetz eine EMK in Schleife 2:
Darüber hinaus erzeugt der an Schleife 1 angelegte Strom nicht nur keine elektromotorische Kraft in Schleife 2, sondern auch in Schleife 1 selbst.
Auch hier ist sie proportional zum Strom:
Dieser neue Koeffizient wird als Selbstinduktivität bezeichnet.
In einer Spule kann die elektromotorische Kraft ausgedrückt werden als:
Die gesamte pro Zeiteinheit verrichtete Arbeit ist:
Also:
Weiterhin gilt:
Daher:
Nach Maxwells Gleichung gilt:
Also:
Ähnlich gilt unendlich weit entfernt.
6.3 Poynting-Theorem und Energieerhaltung
Zwei Gleichungen aus den Maxwell-Gleichungen extrahieren:
Multiplizieren wie folgt:
Subtrahieren:
Diese Gleichung umgestellt ergibt:
Wir definieren:
als die Energiedichte des EMV (Elektromagnetisches Feld). Und:
als den Poynting-Vektor, der die Energiedichtefluss repräsentiert.
Der Term kann auch wie folgt zugeordnet werden:
Daher kann das Poynting-Theorem auch durch ausgedrückt werden.
ist offensichtlich die vom Lorentz-Kraft verrichtete Arbeit. Diese Gleichung besagt, dass:
6.4 Energiefluss in Materie
In Materie wiederholt man den obigen Prozess, ersetzt jedoch die Permittivität und Permeabilität:
Multiplizieren wie folgt:
Subtrahieren:
Diese Gleichung umgestellt ergibt:
Dies ist die Form des Poynting-Theorems.
Der Poynting-Vektor:
und die Energiedichte:
7. Impuls
7.1 Maxwellscher Spannungstensor
Wir kennen die Kraftdichte:
Gesamtkraft:
Wir schlagen vor, sie allein durch das Feld auszudrücken.
Zur Vereinfachung von führen wir den Maxwellschen Spannungstensor ein:
Daher:
mit der Komponente:
Die Kraftdichte vereinfacht sich dann zu:
Zur Ermittlung der Gesamtkraft integrieren wir:
7.2 Impulserhaltung
Wir bezeichnen als den mechanischen Impuls.
In einem isolierten Raum gilt:
Dies ist eine Standardform der Erhaltungsfunktion.
(Änderung der Dichte = Fluss aus dem Volumen)
Daher muss der Term
ebenfalls ein Impuls sein.
Er wird vom EMV getragen. Definiere:
als die Dichte des EMV-Impulses.
Dann haben wir:
Diese Gleichung ist das Impulserhaltungsgesetz des EMV.
Mit der Darstellung von schreiben wir die Gleichung in infinitesimaler Zeit in integraler Form um:
Die linke Seite ist die gesamte Impulsänderung pro Zeiteinheit,
einschließlich mechanischem und elektromagnetischem Impuls.
Offensichtlich ist die rechte Seite der gesamte Impulsfluss aus dem Gebiet,
d.h. der Impulsfluss.
Daher wird der Tensor auch als Impulsflussdichtetensor bezeichnet.
Oberflächlich betrachtet führt der Impuls zu einer Kraft.
Auf einer Fläche, gegeben ihre Normalenrichtung ,
erinnern wir uns an den Kraftintegranden:
Auf eine Einheitsfläche setzen wir gleich 1.
Dieser Vektor wird als Spannungsvektor bezeichnet und repräsentiert die Kraft auf eine Einheitsfläche an der Oberfläche.
Außerdem bildet die Normalkomponente den Druck:
7.3 Drehimpuls
Basierend auf dem Impuls führen wir den Drehimpuls ein:
8. Elektromagnetische Wellen (EMW)
8.1 1D-Wellen
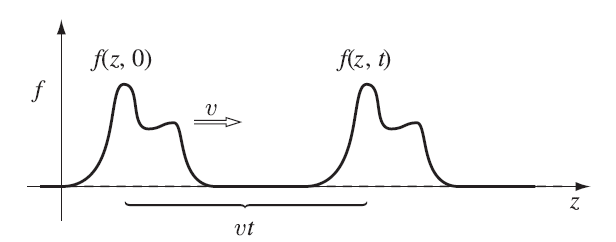
Eine Welle ist eine Störung eines kontinuierlichen Mediums, die sich mit fester Form und konstanter Geschwindigkeit ausbreitet. Angenommen, die Auslenkung der Punkte des Mediums von der Gleichgewichtslage ist . Aus der Abbildung haben wir:
Skizze einer 1D-Welle
Sei . Wir nehmen die Ableitung der Funktion :
Die Ableitungen zweiter Ordnung sind:
Die Gleichungen ergeben offensichtlich die Standard-Wellen-Gleichung:
Wenn wir zwei Parameter definieren, die Folgendes erfüllen:
Eine Eigenlösung für die Gleichung ist:
wobei die komplexe Amplitude ist, die die Anfangsphase enthält. Da Exponentialfunktionen Eigenzustände bilden, können Wellen beliebiger Form in Komponenten von Exponentialwellen mit unterschiedlichem , aber gleicher Geschwindigkeit , zerlegt werden:
darf sich in den negativen Bereich erstrecken. Wenn positiv bleibt, bedeutet , dass . Offensichtlich entsprechen die Komponenten mit Wellen, die sich in Richtung ausbreiten.
Wenn wir in der Eigenwelle festhalten, ist es offensichtlich, dass der Mediumpunkt zu seinem Anfangszustand zurückkehrt, wenn eine Phasenverschiebung von bewirkt. Daher leiten wir die Periode ab:
Ähnlich, wenn wir festhalten. Wenn eine Phasenverschiebung von bewirkt, verhält sich der Punkt bei vollständig gleich wie bei . Diese Länge wird Wellenlänge genannt und mit bezeichnet:
Die beiden fundamentalen Parameter, und , werden als Wellenzahl bzw. Kreisfrequenz bezeichnet.
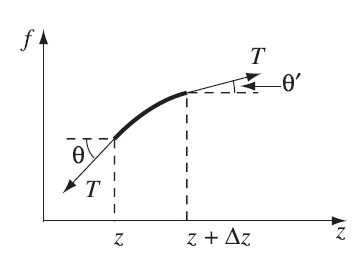
Verschiedene Medien haben unterschiedliche Fähigkeiten, Wellen zu transportieren. Angenommen, die Elastizität der Mediumpunkte wird durch die Spannung bereitgestellt.
Spannung in einer Welle
Wir haben:
Angenommen, die lineare Massendichte ist .
Dann erhalten wir die Wellengleichung:
Verglichen mit der Standardgleichung haben wir die Wellengeschwindigkeit:
Wir können schlussfolgern, dass der Medientyp die Wellengeschwindigkeit bestimmt.
8.2 Polarisation
In der Realität sind 3D-Wellen praktischer. Im 3D-Raum ist die Eigenwelle:
Man kann die Richtungen einfach zusammenfügen, da sie unabhängig sind.
3D-Wellen haben 2 Typen.
Wellen, deren Auslenkung der Mediumpunkte senkrecht zur Ausbreitungsrichtung ist, werden Transversalwellen genannt. Wellen, deren Auslenkung parallel zur Ausbreitungsrichtung ist, werden Longitudinalwellen genannt.
Für Transversalwellen in 3D hat die Auslenkung 2 mögliche Basisrichtungen.
Wenn die Auslenkung entlang erfolgt:
Entlang :
Die Auslenkung kann auch entlang jeder Richtung in der -Ebene oszillieren. Angenommen, der Vektor ist (mit ):
8.3 EMW im Vakuum
Im Vakuum gibt es keine freien Ladungen () oder Ströme (). Die Maxwell-Gleichungen vereinfachen sich zu:
Wenn wir die Rotation der zweiten Gleichung nehmen, :
Unter Verwendung der Vektoridentität . Da , haben wir:
Andererseits, durch Einsetzen der vierten Maxwell-Gleichung, :
Wenn wir die beiden Ergebnisse für gleichsetzen und ähnlich für , erhalten wir die Wellengleichungen:
Wenn wir uns an die Standard-3D-Wellen-Gleichung erinnern, vergleichen wir sie mit den - und -Gleichungen, um die Wellengeschwindigkeit zu finden:
Im Vakuum wird diese Geschwindigkeit als Lichtgeschwindigkeit bezeichnet:
Die Eigenwellenlösung ist:
Da die Wellengleichung aus den Maxwell-Gleichungen abgeleitet wird, müssen alle Lösungen die Maxwell-Gleichungen erfüllen. Anwenden von und :
Für eine Welle, die sich in -Richtung ausbreitet, müssen die -Komponenten verschwinden:
Da die -Komponenten von und verschwinden, ist die EMW eine Transversalwelle. Diese einfachste Eigenwelle wird als monochromatische ebene Welle bezeichnet.
Darüber hinaus erhalten wir durch Anwenden des Faradayschen Gesetzes, , die Beziehung zwischen den Amplituden in kompakter Form:
Es gibt nichts Besonderes an der -Richtung. Im Allgemeinen ist die monochromatische Welle:
wobei in Richtung der Ausbreitung zeigt.
Die Energiedichte ist:
Durch Einsetzen von und in den Ausdruck:
Komplexe Ausdrücke können nicht direkt gemessen werden; die Magnitude ist die Amplitude und das Argument ist die Phase. Gemessen wird der Realteil.
Wenn sich die Welle ausbreitet, transportiert sie Energie mit sich. Die Energieflussdichte wird durch den Poynting-Vektor dargestellt:
Für eine monochromatische Welle in -Richtung:
Die Impulsdichte ist:
Da das elektrische Feld für Licht (eine Art EMW) sehr schnell variiert, betrachten wir den zeitlichen Mittelwert (), analog zum Effektivwert in Wechselstromkreisen.
Mittlere Energiedichte:
Mittlerer Poynting-Vektor:
Mittlere Impulsdichte:
Die mittlere Leistung pro Flächeneinheit wird Intensität genannt:
Impuls erzeugt Druck. Der Strahlungsdruck ist:
8.3 EMW in Materie
In linearen Materialien werden die Maxwell-Gleichungen zu:
Wenn keine freien Ladungen und Ströme vorhanden sind, kollabieren die Gleichungen:
Dann ist alles dasselbe wie im Vakuum. Der einzige Unterschied ist:
wird als Brechungsindex bezeichnet. Alles ist dasselbe, nachdem , durch , ersetzt wurden.
Die Energiedichte ist:
Der Poynting-Vektor ist:
Die Intensität ist:
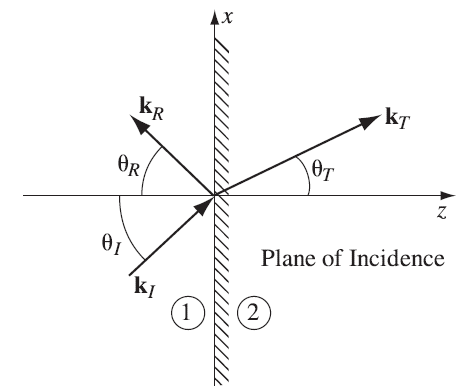
Ein interessantes Problem ist das Verhalten an der Grenzfläche. Gemäß den Grenzbedingungen:
Definieren wir nun einfallende, reflektierte und transmittierte Wellen.
Einfallend:
Reflektiert:
Transmittiert:
Verhalten an der Grenzfläche
An der Grenzfläche definieren wir , d.h. nur -Komponenten sind enthalten. Dann sind bei jedem Punkt die 3 Felder:
Wenden wir die Tangential-Grenzbedingung an:
Diese Gleichung gilt für jedes . Daher müssen die Exponentialfunktionen erfüllen:
Einfallende und reflektierte Wellen teilen sich die gleiche Geschwindigkeit, daher . Also:
Wir haben das Reflexionsgesetz abgeleitet. Als nächstes, , .
Alle Wellen teilen sich das gleiche . Dann für einfallende und transmittierte Wellen:
Wir haben das Brechungsgesetz, auch Snellius-Gesetz genannt, abgeleitet.
Nachdem die Exponentialfaktoren berücksichtigt wurden, heben sie sich auf. Die tangentialen Grenzbedingungen werden zu:
Im Allgemeinen werden und in - und -Komponenten zerlegt. Relativ zur Einfallsebene ist die -Polarisation definiert als senkrecht schwingend, während die -Polarisation parallel ist.
Für -Polarisation ist die tangentiale elektrische Feldbedingung:
Die magnetische Feldbedingung ist:
Durch Einsetzen von und :
Da :
Zusammenfassung des Systems für -Polarisation:
Für -Polarisation ist das Gleichungssystem:
Lösen Sie sie separat.
Die Reflexionskoeffizienten () und Transmissionskoeffizienten () sind:
Erinnern wir uns an das Snellius-Gesetz, es gilt für jedes :
Experimente zeigen, dass unter einem bestimmten verschwindet. Bezeichnen wir diesen Winkel als . Wir haben:
Leiten wir wie folgt ab:
Setzen wir aus dem Snellius-Gesetz ein:
Das Verhältnis für ist:
Dieser Winkel wird Brewster-Winkel genannt. In diesem Fall:
Das bedeutet, bei diesem Einfallswinkel sind reflektierte und transmittierte Welle senkrecht zueinander ().
Die einfallende Welle zwingt die Teilchen im gesicherten Medium (als Dipole betrachtet) zum Schwingen.
-polarisierte Wellen verursachen Schwingungen innerhalb der Einfallsebene. Dipole geben jedoch keine Energie entlang der Schwingungsrichtung ab.
Im zweiten Medium werden die Dipole durch die transmittierte Welle angetrieben. Wenn , fällt die Reflexionsrichtung mit der Schwingungsrichtung zusammen. Daher wird keine Energie emittiert.
Die 4 Koeffizienten werden Fresnel-Koeffizienten genannt. Für eine beliebig polarisierte Welle definieren wir:
Einfallendes elektrisches Feld:
Reflektiertes elektrisches Feld:
Energie-Reflexionsrate :
Transmittiertes elektrisches Feld:
Energie-Transmissionsrate :
Nach Energieerhaltung:
8.4 Beugung
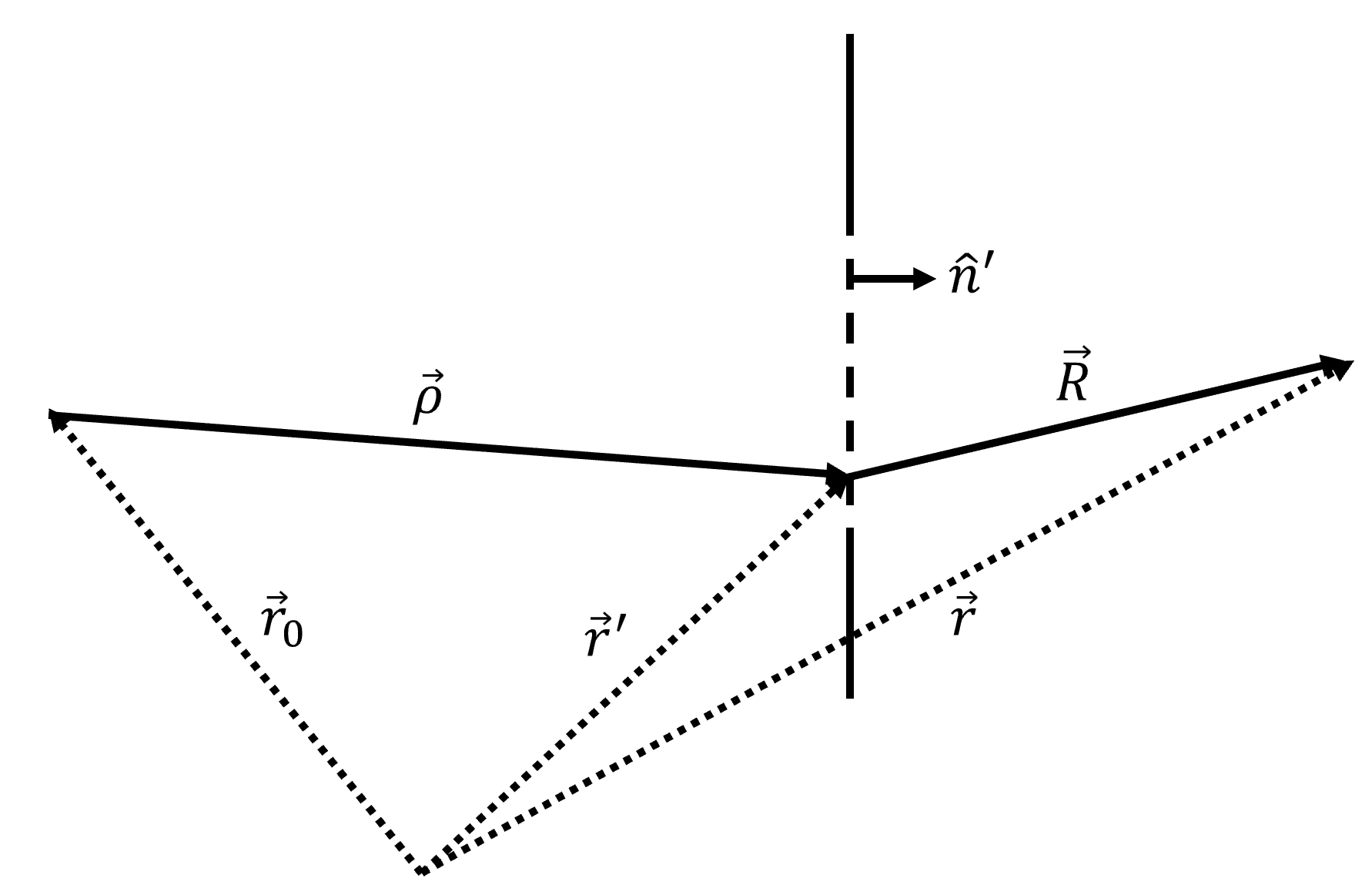
Die grundlegende Methode zur Lösung von Beugungsproblemen ist die Lösung der Wellenfunktion unter gegebenen Randbedingungen. Betrachten wir eine beliebige Komponente von oder , bezeichnet als . erfüllt die Wellengleichung
Für eine monochromatische Welle mit Frequenz gilt . Definieren wir die Wellenzahl . Einsetzen ergibt die Helmholtz-Gleichung (an der Quelle, als Randgleichung)
Es mag verwirrend sein, warum hier ein Apostroph auftaucht. Tatsächlich erfüllt die Helmholtz-Gleichung überall ohne Ladung. Aber im Beugungsproblem behandeln wir die einfallende Welle auf der Apertur als Quelle, gemäß dem Huygens-Prinzip. Daher dient die Welle auf der Apertur als Randbedingung. Wir leiten die Welle im gesamten Raum durch die Green-Funktions-Methode ab. Wählen wir nun eine Green-Funktion, die sphärische Welle, die von einer Einheitsquelle am Quellpunkt erzeugt wird
wobei . Sie erfüllt
Wenden wir die zweite Green'sche Gleichung an
Ersetzen wir und durch
dann
Wir benötigen für weitere Berechnungen.
Im optischen Sinne, , dann ist .
Angenommen, die einfallende Welle ist eine sphärische Welle von ,
Ähnlich
Setzen wir alles in ein
Diese Gleichung wird Kirchhoff-Gleichung genannt.
Beugungskonfiguration
In großen Entfernungen, , . Der Integrand vereinfacht sich zu
8.5 EMW in Materie
In linearen Materialien werden die Maxwell-Gleichungen zu:
Wenn keine freien Ladungen und Ströme vorhanden sind, kollabieren die Gleichungen:
Dann ist alles dasselbe wie im Vakuum. Der einzige Unterschied ist:
wird als Brechungsindex bezeichnet. Alles ist dasselbe, nachdem , durch , ersetzt wurden.
Die Energiedichte ist:
Der Poynting-Vektor ist:
Die Intensität ist:
Ein interessantes Problem ist das Verhalten an der Grenzfläche. Gemäß den Grenzbedingungen:
Definieren wir nun einfallende, reflektierte und transmittierte Wellen.
Einfallend:
Reflektiert:
Transmittiert:
Verhalten an der Grenzfläche
An der Grenzfläche definieren wir , d.h. nur -Komponenten sind enthalten. Dann sind bei jedem Punkt die 3 Felder:
Wenden wir die Tangential-Grenzbedingung an:
Diese Gleichung gilt für jedes . Daher müssen die Exponentialfunktionen erfüllen:
Einfallende und reflektierte Wellen teilen sich die gleiche Geschwindigkeit, daher . Also:
Wir haben das Reflexionsgesetz abgeleitet. Als nächstes, , .
Alle Wellen teilen sich das gleiche . Dann für einfallende und transmittierte Wellen:
Wir haben das Brechungsgesetz, auch Snellius-Gesetz genannt, abgeleitet.
Nachdem die Exponentialfaktoren berücksichtigt wurden, heben sie sich auf. Die tangentialen Grenzbedingungen werden zu:
Im Allgemeinen werden und in - und -Komponenten zerlegt. Relativ zur Einfallsebene ist die -Polarisation definiert als senkrecht schwingend, während die -Polarisation parallel ist.
Für -Polarisation ist die tangentiale elektrische Feldbedingung:
Die magnetische Feldbedingung ist:
Durch Einsetzen von und :
Da :
Zusammenfassung des Systems für -Polarisation:
Für -Polarisation ist das Gleichungssystem:
Lösen Sie sie separat.
Die Reflexionskoeffizienten () und Transmissionskoeffizienten () sind:
Erinnern wir uns an das Snellius-Gesetz, es gilt für jedes :
Experimente zeigen, dass unter einem bestimmten verschwindet. Bezeichnen wir diesen Winkel als . Wir haben:
Leiten wir wie folgt ab:
Setzen wir aus dem Snellius-Gesetz ein:
Das Verhältnis für ist:
Dieser Winkel wird Brewster-Winkel genannt. In diesem Fall:
Das bedeutet, bei diesem Einfallswinkel sind reflektierte und transmittierte Welle senkrecht zueinander ().
Die einfallende Welle zwingt die Teilchen im gesicherten Medium (als Dipole betrachtet) zum Schwingen.
-polarisierte Wellen verursachen Schwingungen innerhalb der Einfallsebene. Dipole geben jedoch keine Energie entlang der Schwingungsrichtung ab.
Im zweiten Medium werden die Dipole durch die transmittierte Welle angetrieben. Wenn , fällt die Reflexionsrichtung mit der Schwingungsrichtung zusammen. Daher wird keine Energie emittiert.
Die 4 Koeffizienten werden Fresnel-Koeffizienten genannt. Für eine beliebig polarisierte Welle definieren wir:
Einfallendes elektrisches Feld:
Reflektiertes elektrisches Feld:
Energie-Reflexionsrate :
Transmittiertes elektrisches Feld:
Energie-Transmissionsrate :
Nach Energieerhaltung:
8.6 Absorption
Leiter absorbieren normalerweise die Energie von EMW. Es gibt keine gebundenen Ströme oder Ladungen. Der freie Strom ist nicht Null:
Die Maxwell-Gleichungen ändern sich:
Außerdem durch die Kontinuitätsgleichung:
Lösen Sie nach :
Jede Anfangsladung dissipiert. Für einen perfekten Leiter . Es gibt keine akkumulierte Ladung. In diesem Fall:
Die Wellengleichung wird zu:
Eine monochromatische Welle und wird immer noch zugelassen, aber die Wellenzahl wird als komplexe Zahl eingeführt, wobei .
Im Allgemeinen:
Der Imaginärteil führt zu einer Dämpfung mit der Entfernung. Die charakteristische Dämpfungslänge, auch Skintiefe genannt, ist definiert als:
An der Grenzfläche zwischen einem Medium und einem Leiter:
Für einen nicht-perfekten Leiter ist der Prozess sehr ähnlich. Wir nehmen an, dass die einfallende Welle senkrecht zur Oberfläche steht, daher ist . Nach der Tangentialbedingung, mit :
Einfallend:
Reflektiert:
Transmittiert:
Wir nehmen an, dass die einfallende Welle senkrecht zur Oberfläche steht,
daher .
Nach der Tangentialbedingung,
mit .
mit .
Lösen nach den Koeffizienten:
Reflexionskoeffizient :
Transmissionskoeffizient :
Das Verhältnis bestimmt die Reflexions-/Transmissions-Eigenschaft.
Für einen perfekten Leiter, , geht die Skintiefe . , .
Dann , .
Wenn (nicht-magnetisch), dann , .
ist komplex. .
8.7 Dispersion
Manchmal hängt die Geschwindigkeit einer Welle von ihrer Frequenz ab. Dieses Phänomen wird Dispersion genannt, das tragende Medium wird als dispersiv bezeichnet, was eine natürliche Eigenschaft des Mediums ist.
In einem dispersiven Medium ändert sich eine Welle, die aus einem Frequenzbereich besteht, ihre Form.
Eine Frequenz repräsentiert eine monochromatische Welle, die sich mit der Phasengeschwindigkeit ausbreitet
Das Wellenpaket als Ganzes breitet sich mit der Gruppengeschwindigkeit aus
Nun tauchen wir in die Dispersion ein. Wir nehmen an, dass Elektronen an einer Gleichgewichtsposition durch ein quadratisches Potential gebunden sind.
Die Bindungskraft ist
Offensichtlich ist das tatsächliche Potential anstelle von . Hier ist unser Ziel, die kleine Schwingung von Elektronen zu beschreiben. Tatsächlich kann jedes Potential erweitert werden
Im Gleichgewicht ist . Nehmen wir das Potential am Gleichgewicht als Referenz, dann ist .
Daher ist für kleine Störungen .
Elektronen werden während der Bewegung gedämpft.
ist der Dämpfungskoeffizient. Darüber hinaus treibt ein externes die Schwingung an.
Erhalten der Bewegungsgleichung
Lösung
Die Schwingung von erzeugt ein Dipolmoment . Angenommen, jedes Molekül besitzt Elektronen mit der Eigenfrequenz ( ist die -te Eigenfrequenz des Mediums).
Moleküle pro Volumeneinheit. Die Gesamtpolarisation
Die Polarisierbarkeit ist definiert durch
Daher
Zu diesem Zeitpunkt ist die Dielektrizitätskonstante eine komplexe Konstante, dann die Reflexionsrate
ist ebenfalls eine komplexe Zahl. Die Wellenzahl
Der Realteil von trägt zum Realteil von bei und wirkt als ursprüngliche Wellenzahl, die die Wellenlänge bestimmt. Der Imaginärteil von trägt zur Absorption bei. Der Dämpfungsterm ist .
Der Dämpfungskoeffizient
Der Faktor 2 kommt daher, dass .
Mit diesen Beziehungen leiten wir die Beziehung von zu ab
Reale und imaginäre Teile trennen.
Im Allgemeinen ist des sichtbaren Lichts weit größer als . Die Absorption ist sehr schwach. In diesem Bereich können wir ignorieren.
Da , kann entwickelt werden.
Definieren
dann
Absorbieren Sie in .
Dies wird als Cauchy-Formel bezeichnet.
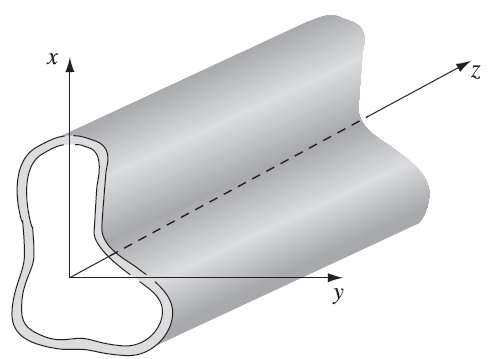
8.8 Geführte Wellen
Betrachten wir EMW, die auf das Innere eines Hohlrohrs beschränkt sind. Das Hohlrohr wird als Wellenleiter bezeichnet. Es ist ein perfekter Leiter, daher ist im Inneren , . Die Randbedingungen an der Innenwand sind
Wellenleiter
Die beiden obigen Gleichungen sind Einschränkungen für EMW im Hohlraum. Elektrische Felder ergeben normale Bedingungen.
im Leiter ist 0. Um die Bedingungen zu erfüllen, werden freie Ladungen und Ströme an der Innenwand induziert. Angenommen, EMW
sie erfüllen
Lösen wir sie nach Komponenten auf
Wenn wir auf anwenden, erhalten wir
Ähnlich für
Daher können wir die Operatoren und durch bzw. ersetzen, um zu vereinfachen.
Die Wellengleichungen ergeben
In einem Wellenleiter können und nicht gleichzeitig Null sein.
Wenn
Wenn
Leiten wir sie zur zweiten Ableitung ab
Sie gelten gleichzeitig nur, wenn , . Sie sind jedoch oszillierend.
Q.E.D.
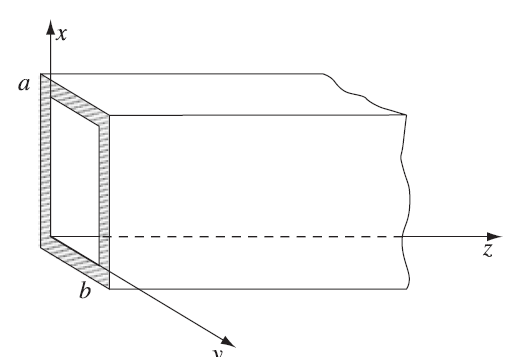
Wir nehmen einen rechteckigen Wellenleiter. Wir setzen und
Rechteckiger Wellenleiter
Also
Teilen durch :
wobei
Die Lösung ist
wegen .
erfordernd
Einsetzen
Ergebnisse in
Ähnlich für :
Dann
Beachten Sie, dass die räumliche Frequenz von diskret ist, was ein unvermeidliches Ergebnis der periodischen Randbedingung ist. () bilden Moden von EMW im Wellenleiter.
Bei Mode :
Die Wellenzahl wird imaginär, wenn
wird als Grenzfrequenz der Mode bezeichnet. Jede Komponente mit einer Frequenz unterhalb von wird vom Wellenleiter absorbiert. Die niedrigste Frequenz oder wird als dominante Mode bezeichnet (abhängig davon, welche kleiner ist).
In der obigen Ableitung haben wir gesetzt, was bedeutet, dass transversal ist. Solche Moden werden als bezeichnet. Wenn wir setzen, ist die Ableitung vollständig dieselbe und ergibt eine Menge von völlig anderen Moden, die als bezeichnet werden.
Wenn eine monochromatische Welle mit Frequenz in den Wellenleiter eintritt, wird die Energie sofort auf Moden umverteilt, einschließlich und . Nur Moden mit können passieren, während andere Moden absorbiert werden.
In einem Wellenleiter wird die Energieausbreitung durch den Poynting-Vektor bestimmt
Wir interessieren uns nur für die Ausbreitung entlang der -Achse. Wir zerlegen dann .
wobei in der -Ebene liegen. Extrahieren Sie die Magnitude von .
und bilden einen Hilbert-Raum. Prüfen Sie, ob das innere Produkt von für verschiedene Moden
kann bewiesen werden, ob sich verschiedene Moden gegenseitig beeinflussen.
Wir beweisen es jetzt. In -Moden.
Feld in der -Ebene
Nehmen Sie das innere Produkt für 2 Moden
Ähnlich
hat die gleiche Schlussfolgerung. Dann
Wir können sagen, dass verschiedene Moden orthogonal sind.
Zurück zur monochromatischen Welle. Mit Orthogonalität sollte das durch Moden zerlegt werden.
Der Koeffizient wird bestimmt durch:
Wir haben den Einfallswinkel nicht berücksichtigt, da die Moden Ergebnisse von Reflexion, Brechung und so weiter sind. Die Winkel sind in den kodiert.
9. Strahlung
9.1 Potenzialformulierung
Aus den Maxwell-Gleichungen,
Dies kann in der Form ohne Rotation geschrieben werden,
In Bezug auf und kann abgeleitet werden:
Kombiniert mit
kann das Feld direkt aus dem Potenzial abgeleitet werden. Aber für spezifische ist nicht eindeutig. Angenommen, zwei Sätze von Potenzialen und ,
Wir nehmen an, sie ergeben dasselbe , dann
Wir können als Gradienten eines Skalars schreiben,
dann
Der Term in Klammern ist daher unabhängig von der Position,
wobei nur von der Zeit abhängt. Wir können in absorbieren, ohne andere Effekte zu verursachen.
Dann
Somit kann jede skalare Funktion ändern und einen anderen Satz von Potentialen erhalten, der dasselbe Feld ergibt. Diese Transformation wird Eichungstransformation genannt.
Es gibt zwei gebräuchliche Eichtransformationen, die Coulomb-Eichung und die Lorentz-Eichung.
In der Coulomb-Eichung wählen wir
Damit gilt:
In der Coulomb-Eichung wird das skalare Potenzial durch die aktuelle Ladungsverteilung bestimmt, was im Widerspruch zur relativistischen Begrenzung der Ausbreitungsgeschwindigkeit zu stehen scheint. Zur Erklärung: ist keine messbare Größe, die messbare Größe ist . Jedoch
Wenn sich ändert, ändert sich auch , wodurch Teile der Variation von eliminiert werden. Schließlich breitet sich mit Lichtgeschwindigkeit aus. Unter der Coulomb-Eichung ist leicht zu berechnen, aber ist schwierig. In der Coulomb-Eichung lautet die Differentialgleichung für :
In der Lorentz-Eichung wählen wir
Dies dient zur Vereinfachung der Gleichung für und . Damit gilt:
Währenddessen
wird zu
Wir können feststellen, dass und derselben Form folgen.
Diese Gleichungen werden als D'Alembert-Gleichungen bezeichnet.
Die Lorentz-Kraft kann in Bezug auf Potentiale ausgedrückt werden.
Der Ableitungsterm von
wird als konvektive Ableitung von bezeichnet und als geschrieben.
Dann
Die EM-Felder fügen zusätzliche Terme für Impuls und Energie hinzu. Wir definieren den kanonischen Impuls
und die geschwindigkeitsabhängige Energie
9.2 Retardierte Potentiale
Elektromagnetische Effekte breiten sich mit Lichtgeschwindigkeit aus. Wenn ein Beobachter EM-Effekte am Feldpunkt beobachtet, wurden diese einige Zeit zuvor am Quellpunkt erzeugt. Die Verzögerungszeit ist
Dann beobachten wir zur Zeit am Punkt einen Effekt, der zur Zeit
erzeugt wurde. Diese Zeit wird als retardierte Zeit bezeichnet. Eine natürliche Verallgemeinerung der Potentiale ist:
Diese werden als retardierte Potentiale bezeichnet. Erfüllen sie die D'Alembert-Gleichungen?
Und
wobei
Divergenz nehmen:
Somit
Das elektrische Potenzial erfüllt die D'Alembert-Gleichung. Ähnliches gilt für . Daher sind retardierte Potentiale gültige Potentiale in der Lorentz-Eichung.
Gegebene retardierte Potentiale:
Offensichtlich gilt:
und wir haben den Gradienten von berechnet. Mit gilt:
Für finden wir zuerst:
Dann
Die beiden Gleichungen werden als Jefimenko-Gleichungen bezeichnet.
Wenn sich Ladungen beschleunigen, transportieren ihre Felder Energie nach unendlich, was als Strahlung bezeichnet wird. Angenommen, die Quelle ist nahe dem Ursprung lokalisiert. Die Leistung, die durch eine geschlossene Fläche fließt, ist
EMW reisen mit Lichtgeschwindigkeit . Die Energie verlässt die Quelle zur Zeit . Dann gilt:
9.3 Spezifische Strahlungsfelder
Wechselstrom
Wechselstrom bringt periodischen Strom und Ladung mit sich:
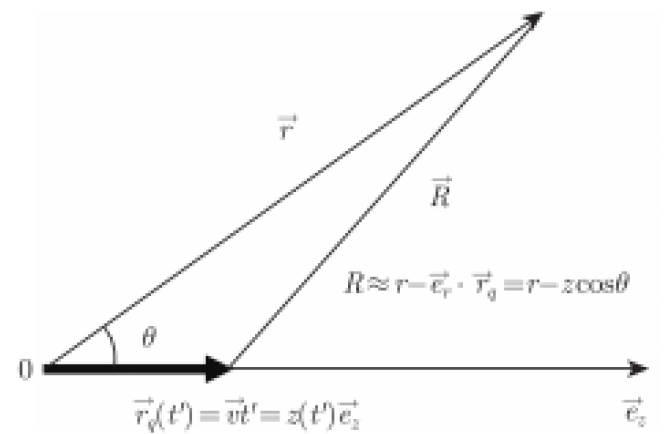
Eingesetzt in das retardierte Potenzial:
wobei
Gemäß der Definition der Strahlung sollten wir annehmen. Dann machen wir eine Näherung:
Einsetzen der Näherung:
Weiter entwickeln:
Wir leiten und aus der Lorentz-Eichung ab.
Betrachten wir den -ten Term von :
Dann gilt:
Dann können und nach Ordnungen zerlegt werden:
Der mittlere Poynting-Vektor über eine Periode (ähnlich dem Effektivwert im Wechselstrom) ist:
Die Strahlungsleistung ist:
Offensichtlich wird für der Integrand zu 0. Daher trägt nur der Term zur Strahlung bei. Dann kann das Potenzial vereinfacht werden:
Das Magnetfeld:
Wir vernachlässigen höhere Ordnungsterme in . Ähnlich erhalten wir das skalare Potenzial:
Gemäß
und
dann gilt:
Mittlere Energieflussdichte:
Und Strahlungsleistung:
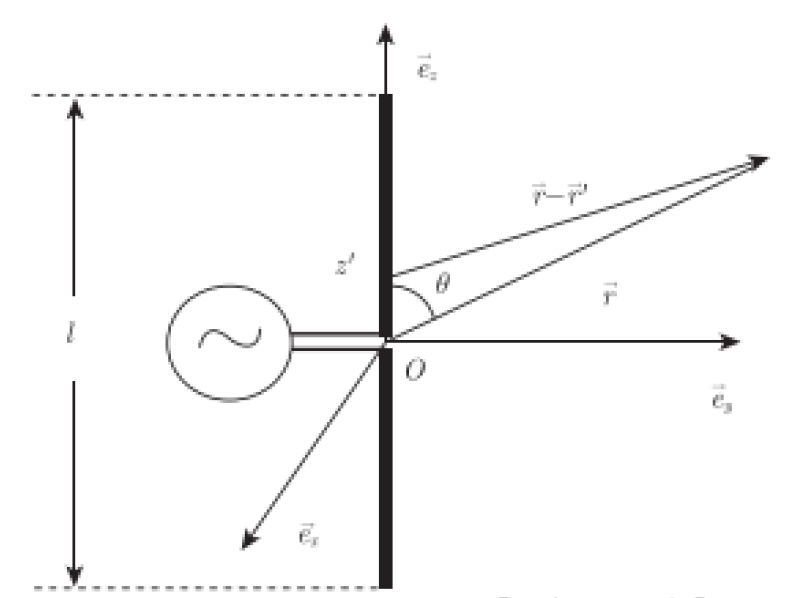
Dünne, gerade Antenne
Angenommen, die Länge der Antenne sei . Nehmen wir den Mittelpunkt als Ursprung. Der variierende Strom wird vom Ursprung eingespeist. Die Antenne ist ein guter Leiter.
Dünne, gerade Antenne
Das elektrische Feld innerhalb der Antenne ist 0. An der Oberfläche gilt:
Somit
Ableiten nach der Zeit:
Da nur eine -Komponente hat, gilt:
Mit der Lorentz-Eichung
erhalten wir
Dies ist eine Wellengleichung. Gemäß der Beziehung zwischen und können wir sagen:
Bei ist . Somit ist eine stehende Welle.
wobei . Wir berechnen dann die Strahlungsleistung.
wobei . Wenn die Antenne klein ist (), nähern wir uns mit .
Die Gesamtleistung ist:
Die Strahlungsleistung steigt schnell mit der Vergrößerung von .
Eine Antenne mit wird als Halbwellenantenne bezeichnet, mit . Eingesetzt gilt:
Die stärkste Abstrahlrichtung kann bestimmt werden durch:
Wir erhalten als stärkste Richtung.
Multipole
Angenommen, die Größe des Systems , wobei die Wellenlänge der EMW ist. Gleichzeitig gilt . Unter dieser Bedingung entwickeln wir nach .
Der erste Term entspricht der Dipolstrahlung und der zweite Term der Quadrupolstrahlung.
Wir prüfen zuerst den Dipol. Wir berechnen:
Beide Seiten integrieren:
Der Integrand ist gleich Null, da an der Oberfläche Null ist. Somit gilt:
Daher
Magnetisches Potenzial:
Feld:
Poynting-Vektor:
Dann gilt:
Als nächstes behandeln wir die Quadrupolstrahlung. Betrachten wir den zweiten Term von :
Wir konzentrieren uns auf beide Terme. Zuerst inspizieren wir:
Dann gilt:
Dann gilt:
Und
Ableiten nach der Zeit:
Der negative Term:
Dann das Potenzial zweiter Ordnung:
wird in Quadrupol- und magnetische Dipolbeiträge aufgeteilt. Für Quadrupol:
Für magnetischen Dipol:
10. Relativität in der Elektrodynamik
10.1 Spezielle Theorie
Die Maxwell-Gleichungen sagen voraus, dass sich Licht in einem bestimmten Medium ausbreitet. Früher dachte man, dies sei der Äther, ein absolut statisches, inertiales Bezugssystem. Das Michelson-Morley-Experiment verneinte jedoch die Existenz des Äthers. Um diesen Konflikt zu lösen, stellte Einstein zwei berühmte Postulate auf.
Das Relativitätsprinzip: Die Gesetze der Physik gelten in allen Inertialsystemen mit gleicher Form.
Die universelle Lichtgeschwindigkeit: Die Lichtgeschwindigkeit im Vakuum ist für alle Inertialbeobachter gleich , unabhängig von der Bewegung der Quelle.
Der erste Satz besagt, dass es kein absolutes Ruhesystem gibt. Der zweite besagt, dass es keinen Äther gibt.
Nun leiten wir basierend auf den beiden Postulaten die Koordinatentransformationsregel in der Relativitätstheorie ab, die Lorentz-Transformation genannt wird. Die Transformation in der klassischen Mechanik wird Galilei-Transformation genannt.
Betrachten wir zwei Inertialsysteme , . bewegt sich entlang der positiven -Achse mit Geschwindigkeit . Angenommen, , , , und wenn die Ursprungspunkte und zusammenfallen, ist .
Angenommen, die Transformation ist linear. Dann gilt für jedes Ereignis
Da es keine Relativbewegung in - und -Richtung gibt, gilt
Das Lichtsignal startet bei und . In zwei Richtungen, zwei Bezugssystemen, ergibt die universelle Lichtgeschwindigkeit separat:
Währenddessen bewegt sich der Ursprung von in mit Geschwindigkeit . Die Koordinate von in ist
Kombinieren wir alle Gleichungen, schreiben wir sie in Matrixform um.
Da , gilt
Und
Dasselbe ergibt sich für negatives Licht:
Kombinieren wir die beiden
Wir haben auch , . Dann gilt
was ergibt
Wir können die Transformation in Matrixform umschreiben
Die Transformation sollte die Orientierung nicht skalieren oder umkehren, daher gilt
Nun können wir die Koeffizienten lösen. Zur Vereinfachung definieren wir zwei Faktoren.
Die Ergebnisse sind:
Die Lorentz-Transformation lautet somit
Die inverse Transformation sollte die Form beibehalten. Ersetzen Sie durch und tauschen Sie die Koordinaten
Dann können wir die Geschwindigkeitsaddition ableiten
Die Inverse ist
Wir betrachten als eine weitere Dimension, somit wird der Raum 4D. Wir bezeichnen die Koordinaten in als
und in als
Und die Lorentz-Transformation lautet
Mit Tensor-Notation können wir schreiben
wobei
die Lorentz-Transformationsmatrix genannt wird.
Wenn sich die Richtung der Geschwindigkeit ändert, wird die Lorentz-Transformationsmatrix zu einer 3D-Version
wobei , , .
Nun definieren wir das Skalarprodukt von 4D-Vektoren. Angenommen, ein Licht breitet sich im Vakuum aus. In legt es die räumliche Distanz zurück
Da die Lichtgeschwindigkeit in allen Inertialsystemen konstant bleibt, gilt
Wir schreiben um
Für ein bestimmmentes Ereignis gilt diese Gleichung in allen Inertialsystemen. Es ist natürlich, die Raumzeit-Distanz zwischen zwei Ereignissen zu definieren
Die Annahme ist erfolgreich, da sie die Wurzel der Lorentz-Transformation ist. Dann wird ein Modul eines 4D-Vektors definiert als
Und das Skalarprodukt ist natürlich
Die Definition ist gut, da sie bei der Lorentz-Transformation konstant bleibt
Der Modul ist ein Spezialfall des Skalarprodukts. Das bedeutet, dass das Raumzeit-Intervall unter Lorentz-Transformationen konstant bleibt.
Wir haben bisher kontravariante Vektoren verwendet. Es ist notwendig, kovariante Vektoren einzuführen. Wenn Sie dies zum ersten Mal hören, schauen Sie bitte unter diesem Link nach. Tensor-Algebra.
Eine solche Definition behält das Skalarprodukt bei
Führen Sie eine Metrik ein
Per Definition ist der Metrik-Tensor daher
die Minkowski-Metrik genannt wird. Der Raum der Raumzeit wird Minkowski-Raum genannt. Der Minkowski-Raum ist ein pseudo-euklidischer Raum. Mit dem Metrik-Tensor gilt
Da der Minkowski-Raum nicht vollständig euklidisch ist, ist das Skalarprodukt nicht positiv-definit. Es kann positiv sein (räumliche Terme dominieren) oder negativ (zeitlicher Term dominiert). Wir definieren die Verschiebung zweier Ereignisse
Und seine Größe kann positiv oder negativ sein. Wir definieren weiter
Wobei das Raumzeit-Intervall von Ereignis A und B ist. Zurück zum Postulat der universellen Lichtgeschwindigkeit, es besagt auch, dass sich Signale nicht mit Geschwindigkeiten über ausbreiten können. Nun, wenn Ereignis B durch A verursacht wird, dann müssen sie durch Signale mit Unterlichtgeschwindigkeit verbunden werden können. Mathematisch gilt
Das bedeutet
d.h.
Somit bedeuten zeitartige Ereignisse, dass Kausalität zwischen A und B physikalisch erlaubt ist (nicht unbedingt). Ähnlich, wenn das Intervall raumartig ist, ist Kausalität nicht erlaubt, die Reihenfolge der Ereignisse kann sich nach einer Lorentz-Transformation ändern. Lichtartige Ereignisse müssen mit Lichtgeschwindigkeit verbunden sein, wenn Kausalität hergestellt wird. Das Signal muss massefrei sein. Lichtartig ist die Grenze der Kausalität.
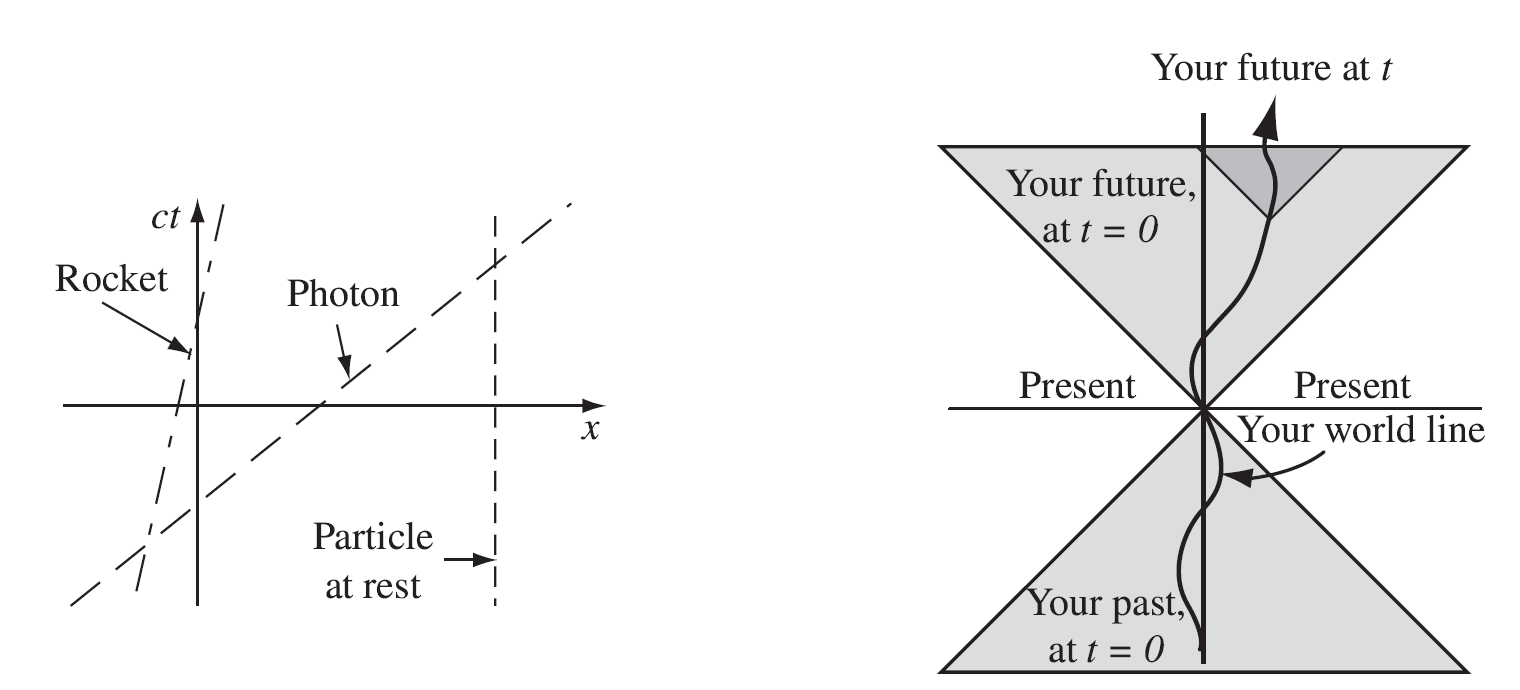
Wir können die Bewegung grafisch durch Minkowski-Diagramme darstellen. Wir zeichnen die räumliche Koordinate horizontal und die Zeitkoordinate () vertikal.
Weltlinien und Lichtkegel
Die Trajektorie in einem Minkowski-Diagramm wird als Weltlinie bezeichnet. Wenn sich ein Teilchen in Ruhe befindet, bleibt seine räumliche Koordinate bei fließender Zeit konstant. Dann ist seine Weltlinie vertikal. Lichtartige Ereignisse treten auf auf, einer Geraden mit Steigung . Da kein Teilchen schneller als reisen kann, sind Weltlinien mit einer Steigung kleiner als 1 nicht erlaubt. Angenommen, Sie starten vom Ursprung bei . Die beiden lichtartigen Geraden (positive Bewegung) und (negative Bewegung) definieren Ihre durch Physik erlaubte Vergangenheit und Zukunft.
Die Struktur bildet geometrisch einen Kegel, den Lichtkegel genannt. Wenn und einbezogen werden, wird es ein Hyperkegel.
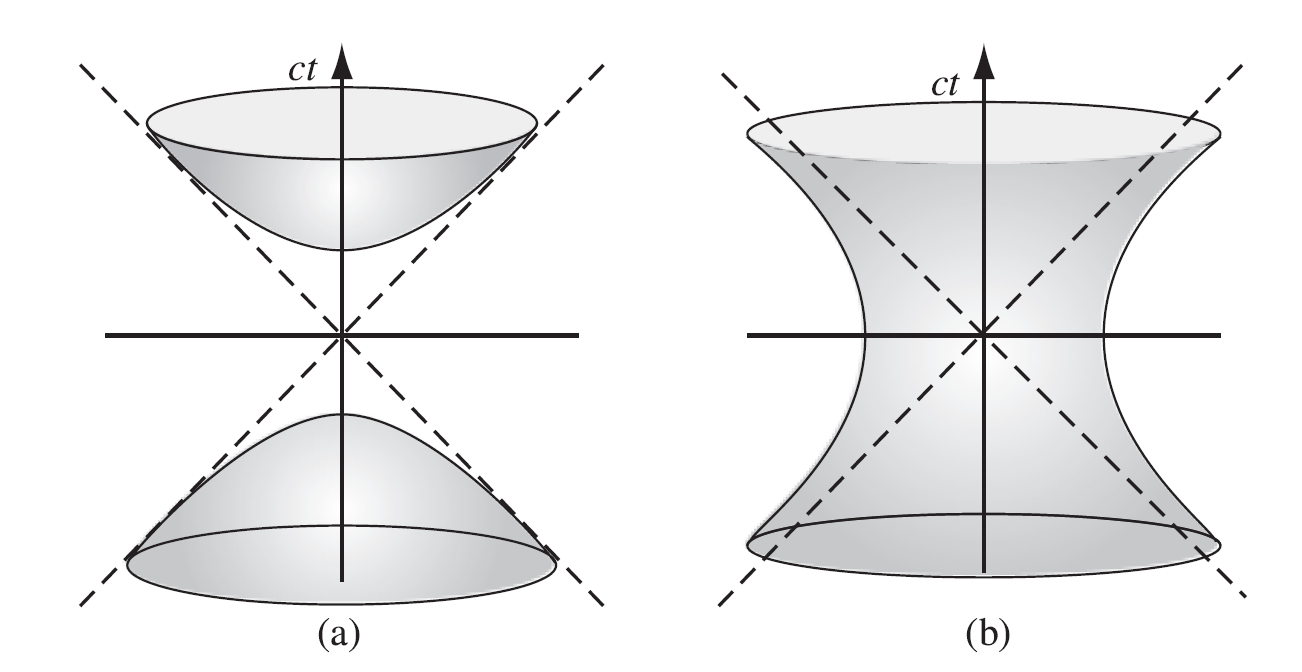
Im Minkowski-Diagramm wählen wir zwei Ereignisse und berechnen ihr Raumzeit-Intervall. Eines der Ereignisse dient als Referenz. Im Hyperkegel nehmen wir an, dass bei die beiden Ereignisse am selben Ort stattfinden (Raumzeit-Intervall ). Aber in den meisten Fällen tun sie das nicht. Bei haben sie normalerweise ein anfängliches Raumzeit-Intervall.
Wenn , bedeutet dies, dass die Verschiebungen raumartig sind. Bei treten sie an verschiedenen Positionen auf, Kausalität ist nicht erlaubt. Da , treten sie bei $x = \pm \sqrt{I]I < 0x = 0t = \pm \sqrt{I]$ auf. Das Minkowski-Diagramm ist ebenfalls eine Hyperbel / ein Hyperboloid, aber der Fokus liegt auf der Zeitachse.
Hyperbel und Hyperboloid im Minkowski-Diagramm
Im Minkowski-Raum ist die Lorentz-Transformation eine Pseudo-Rotation. Mit der Metrik gilt
Dies ist äquivalent zu
In Matrixform gilt
Bezeichnen wir die inverse Matrix mit , die erfüllt
Da pseudo-orthogonal ist, gilt . Dann gilt
Dann gilt für kontravariante Vektoren
Für kovariante Vektoren gilt
Wenn wir den Index neu zuordnen, erhalten wir
Nun untersuchen wir Tensoren unter Lorentz-Transformationen. Wir beginnen mit einem Skalar, der durch Kontraktion erhalten wird
Unter Lorentz-Transformationen sollte unverändert bleiben
Vektoren werden transformiert:
Einsetzen
Eliminieren von und :
Dann gilt
Aber wenn vollständig kontravariant ist, wird die Bedingung:
Einsetzen
Dann gilt
Weiterhin gilt
10.2 Relativistische Mechanik
Im Minkowski-Raum wird die Raumzeit-Geschwindigkeit definiert als
wobei die Eigenzeit genannt wird und die Zeit repräsentiert, die das Teilchen empfindet (Zeit im mit dem Teilchen mitbewegten Bezugssystem), was ein fester Parameter für ein bestimmtes Teilchen ist. Außerdem bedeutet dies, dass unter Lorentz-Transformationen konstant ist. Dann ist die Raumzeit-Geschwindigkeit definiert als
Anwenden der Lorentz-Transformationsmatrix
Nun gibt es eine interessante Schlussfolgerung. Für alle Teilchen ist die Größe der Raumzeit-Geschwindigkeit konstant.
Dies zeigt, dass sich im 4D-Minkowski-Raum alle Teilchen mit der Geschwindigkeit entlang ihrer Weltlinie "bewegen". Wenn die räumliche Geschwindigkeit nicht ist, ist die Geschwindigkeitsprojektion auf die Zeitachse kleiner, und die Eigenzeit verlangsamt sich.
Betrachten wir nun einen Inertialbeobachter im Ruhezustand, dessen Geschwindigkeit ist
Der Minkowski-Raum hat eine orthonormale Basis.
Natürlich haben wir andere räumliche Basisvektoren, aber einer reicht für unsere Ableitung aus. Angenommen, die 3D-räumliche Geschwindigkeit im Beobachtersystem ist
Definieren Sie den Zeitdilatationsfaktor
Im Minkowski-Raum ist die Geschwindigkeitsprojektion auf den Raum-Unterraum aufgrund der Zeitdilatation nicht
Dann gilt
Kombinieren wir
Wenden wir die Bedingung für die Größe an
Schließlich
Dann wissen wir
Dies ist die Zeitdilatation. Die Eigenzeit ist langsamer als die Zeit im Bezugssystem (wir nennen sie "gewöhnliche" Zeit). Bitte achten Sie auf den Index im -Faktor und verwechseln Sie diesen nicht mit dem Faktor, der durch die Bewegung des Koordinatensystems mit Geschwindigkeit eingeführt wird. In den folgenden Abschnitten nennen wir Parameter im bewegten System () "eigene" Parameter und die im Bezugssystem () "gewöhnliche" Parameter.
Neben der Zeitdilatation verkürzt sich ein sich bewegender Lineal auch aus Sicht des Bezugssystems (Referenzereignis im Minkowski-Raum). Betrachten wir einen Hebel mit fester Länge . Wir wollen die Koordinate beider Seiten zur gleichen Zeit messen, daher muss die Messung durch zwei Ereignisse erfolgen. Im statischen Bezugssystem sind die Weltlinien der Seiten des Hebels bzw. . Das dynamische Bezugssystem bewegt sich entlang mit Geschwindigkeit . Wir werden den Hebel in messen und die gemessene Länge erhalten.
In fordern wir, dass zwei Messereignisse erfüllen. Angenommen, in ist das linke Ereignis , das rechte Ereignis ist . Die Lorentz-Transformation ergibt
In gilt , also
Somit gilt
Daher ist die Zeitdifferenz der beiden Ereignisse in . In ist die 4D-Verschiebung
Durch die Lorentz-Transformation gilt in
Die zweite Komponente ist die gewünschte Länge
Somit ist die in gemessene Länge kürzer als ihre feste Länge.
Um die Impulserhaltung in allen Inertialsystemen zu gewährleisten, wird der relativistische Impuls mit der Eigen-Geschwindigkeit definiert.
Die zeitliche Komponente ist natürlich
In der Quantenmechanik wissen wir, dass die Zeitübersetzungsinvarianz der Energieerhaltung entspricht und die räumliche Übersetzungs-Invarianz dem Impulserhalt.
(Prüfen Sie den Link für Details [Symmetries and Conservations](https://elecannonic.github.io/categories/physics/quantum/#12-Symmetries-and-Conservations)).
In der Relativitätstheorie werden Raumzeit-Übersetzungen auf einen Vektor angewendet und der Erhaltungsfluss ist ebenfalls ein 4D-Vektor — . Seine zeitliche Komponente entspricht der Zeitübersetzungs-Invarianz, d.h. der Energie. Die räumliche Komponente ist dann natürlich der Impuls. Aber hat keine Energie-Dimension. Daher wird die Energie definiert als
Wenn das Teilchen ruht, gilt
In Bewegung ist die zusätzliche Energie die kinetische Energie.
Wie die Geschwindigkeit ist auch im Minkowski-Raum die Energie und der Impuls immer erhalten.
Ersetzen Sie durch , dann gilt
Die Kraft im Minkowski-Raum ist
Die räumliche Kraft
ist die mechanische Kraft, die wir in Experimenten messen, wobei der relativistische Impuls ist. Der erste Term
repräsentiert die dem Teilchen zugeführte Leistung.
In der Relativitätstheorie wird der Schwerpunkt der klassischen Mechanik durch den Schwerpunkt der Energie ersetzt.
und der Gesamtimpuls ist
10.3 Relativistische Elektrodynamik
Die Maxwell-Gleichungen haben die Relativität unter Lorentz-Transformationen erfüllt. Um dies zu beweisen, müssen wir die Maxwell-Gleichungen in Tensorform umschreiben. Konfigurieren Sie ein Bezugssystem und ein weiteres Bezugssystem , das sich mit Geschwindigkeit entlang der positiven -Achse von bewegt. Wir haben die Lorentz-Transformation
Nach der Kettenregel gilt
In gilt
Transformieren Sie die Ableitungen in
Die Ladungserhaltung gilt in allen Inertialsystemen. Angenommen, die Transformation ist linear.
In gilt
Einsetzen und Vergleichen der entsprechenden Koeffizienten ergibt
Dies deutet darauf hin, dass der Lorentz-Transformation folgt. Wenn wir die 4D-Stromdichte konstruieren
folgt sie
Die Ladungserhaltung wird zu
Das ist die 4D-Divergenz von . Es besagt also, dass die Stromdichte im 4D-Raum divergenzfrei ist.
Mit können wir dann das 4D-Potential definieren
Wir wollen nun einen Tensor (2 Felder) für die Felder. Wir wissen aus der klassischen Theorie, dass und aus Ableitungen von und gebildet werden. Im 4D-Raum ist es natürlich, 4D-Ableitungen zu verwenden.
Eichinvarianz ist erforderlich. Der Feldtensor sollte sich unter der Eich-Transformation nicht ändern. Allerdings ist nicht eichinvariant. Aber die antisymmetrische Größe
ist eichinvariant, da . Mit dieser Definition sind die Komponenten einfach.
Für gilt
Für , räumliche Komponenten
In erweiterter Form
Um physikalische Gesetze einfach auszudrücken, konstruieren wir einen dualen Tensor von . Ersetzen Sie durch und durch .
Mit diesem Tensor können die Maxwell-Gleichungen umgeschrieben werden
Die einfachen Gleichungen beinhalten tatsächlich alle 4 Maxwell-Gleichungen. Zur Überprüfung expandieren wir sie.
Die erste Gleichung
Sie trennen sich in
Die zweite Tensor-Gleichung wird expandiert zu:
Sie trennen sich in die verbleibenden zwei Maxwell-Gleichungen:
Somit sind die Tensor-Gleichungen äquivalent zu den Maxwell-Gleichungen. Unter Lorentz-Transformation folgt der Tensor der Transformationsregel:
In Bezug auf ist die Minkowski-Kraft
Für gilt
Somit ist die experimentelle Kraft
was die Lorentz-Kraft ist.
Erinnern wir uns an die Lorentz-Eichung
und das 4D-Potential
Berechnen wir die Divergenz im Minkowski-Raum:
Dann gilt
Dies ergibt:
was der d'Alembert-Gleichung entspricht. Wir sehen, dass der d'Alembert-Operator tatsächlich der Laplace-Operator im Minkowski-Raum ist.
10.4 Doppler-Effekt
Die Frequenz einer Welle kann sich ändern, wenn sich die Quelle bewegt. Wir nehmen die gleiche Bezugssystemkonfiguration: Der Beobachter ist in und die Quelle in bewegt sich mit Geschwindigkeit entlang . In ist die feste Frequenz und . Ihre Phase ist ein Lorentz-Skalar
wobei ein 4D-Wellenvektor ist
Er muss der Lorentz-Transformation folgen
Angenommen, , daher gilt
Wenden wir die Lorentz-Transformation an
Erhalten der Frequenz-Transformation
Im Bezugssystem gilt
Setzen wir die Frequenz ein
Der Beobachter blickt auf die Quelle. Da die Richtung der Lichtausbreitung entgegengesetzt zur Sichtrichtung ist, ist der Winkel zwischen Sichtlinie und , ,
Dann ist die beobachtete Frequenz
Dies wird als Doppler-Effekt bezeichnet.
11. Wechselwirkung zwischen geladenen Teilchen und EMV
11.1 Liénard-Wiechert-Potential
Im Allgemeinen sind und eines EM-Systems durch das verzögerte Potential gegeben. Gegeben sei nun eine Punktladung, die sich mit Geschwindigkeit bewegt. Die Ladungs- und Stromdichte $$ \begin{align*} \rho(\vec{r}’, t’) &= q \delta(\vec{r}’ - \vec{r}{\mathrm{s}}(t’)) \ \vec{J}(\vec{r}’, t’) &= q \vec{v}(t’) \delta(\vec{r}’ - \vec{r}{\mathrm{s}}(t’)) \end{align*} $$
Beobachtet bei , hängt das Potential nur vom Zustand der Punktladung bei ab. Somit ist . Das skalare Potential ist daher $$ V(\vec{r}, t) = \dfrac{1}{4\pi\epsilon_{0}} \int \dfrac{q \delta(\vec{r}’ - \vec{r}{\mathrm{s}}(t{\mathrm{r}}))}{|\vec{r} - \vec{r}’(t_{\mathrm{r}})|} d\tau’ $$ Hier gibt es einen Trick: $\delta(\vec{r}’ - \vec{r}{\mathrm{s}}(t{\mathrm{r}})) = 0\vec{r}’ = \vec{r}{\mathrm{s}}(t{\mathrm{r}})t_{\mathrm{r}}\vec{r}’\delta$ \vec{r}’ - \vec{r}{\mathrm{s}}\left(t - \dfrac{|\vec{r} - \vec{r}’|}{c}\right) = 0 $$ Um die Zusammensetzung zu lösen, führen wir $t’ = t{\mathrm{r}} = t - \dfrac{|\vec{r} - \vec{r}’|}{c}\delta$-Funktion ist gleich 1, wenn
Räumliche Bedingung: Bei befindet sich die Ladung bei .
Zeitliche Bedingung: Lichtsignal, das von ausgesendet wird, trifft zum Zeitpunkt bei ein.
In Kapitel 9 haben wir gelernt, dass nur der -Term in und zur Strahlung beiträgt. Ignorieren wir daher alle Terme höherer Ordnung.
Offensichtlich gibt es keine Strahlung, wenn . Im Allgemeinen ist der Poynting-Vektor:
In der Zeit wird die Energie, die bei in emittiert wird, durch gegeben.
Im Allgemeinen ist die Beobachtungszeit nicht so praktisch. Es ist besser, die verzögerte Zeit zu verwenden, d.h. die Zeit, zu der die Energie tatsächlich emittiert wird. In
Gesamtleistung wird als Liénard-Formel bezeichnet.
Erinnern wir uns an den Poynting-Vektor Im Allgemeinen enthält er viele Frequenzkomponenten. Wir trennen sie durch Fourier-Transformation.
Die Strahlung verursacht eine Abnahme der mechanischen Energie. Die Strahlungsleistung ist gegeben durch Die Energieerhaltung erfordert $$ \dfrac{dE}{dt} = -P + \vec{F}{\mathrm{ext}} \cdot \vec{v}, \quad E = \gamma m c^{2} -P = \vec{F}{\mathrm{s}} \cdot \vec{v} P = \dfrac{q^{2}}{6\pi\epsilon_{0} c} \dot{\beta}^{2} = \dfrac{q^{2} \dot{v}^{2}}{6\pi\epsilon_{0} c^{3}} \langle \vec{F}{\mathrm{s}} \cdot \vec{v} \rangle = - \left\langle \dfrac{q^{2} \dot{\vec{v}}^{2}}{6\pi\epsilon{0} c^{3}} \right\rangle $$ Der Zeitmittelwert wird gebildet, da $\vec{F}{\mathrm{s}}T$ \begin{align*} \int{0}^{T} \vec{F}{\mathrm{s}} \cdot \vec{v} dt &= - \int{0}^{T} \dfrac{q^{2} \dot{\vec{v}}^{2}}{6\pi\epsilon_{0} c^{3}} dt \ &= - \int_{0}^{T} \dfrac{q^{2} \dot{\vec{v}}}{6\pi\epsilon_{0} c^{3}} d\vec{v} \ &= - \left. \dfrac{q^{2} \dot{\vec{v}} \cdot \vec{v}}{6\pi\epsilon_{0} c^{3}} \right|{0}^{T} + \int{0}^{T} \dfrac{q^{2} \ddot{\vec{v}}}{6\pi\epsilon_{0} c^{3}} \cdot \vec{v} dt \ &= \int_{0}^{T} \dfrac{q^{2} \ddot{\vec{v}}}{6\pi\epsilon_{0} c^{3}} \cdot \vec{v} dt \end{align*} \vec{F}{\mathrm{s}} = \dfrac{q^{2} \ddot{\vec{v}}}{6\pi\epsilon{0} c^{3}} $$ Diese Kraft wird Abraham-Lorentz-Strahlungsdämpfungskraft genannt. Diese Kraft ist eine äquivalente Größe. Weder in allen Systemen noch zu irgendeiner Zeit gilt .
Erinnern wir uns an die Strahlungsleistung
Betrachten wir ein geladenes Teilchen, das sich im Vakuum bewegt. Da keine Kraft auf es wirkt, sollte die Bewegung gleichförmig bleiben.
Setzen wir dies in die Strahlungsleistung ein, finden wir
Daher strahlen Teilchen im Vakuum nicht.
11.3 Spektralverbreiterung
Ein Atom strahlt Energie ab, in den meisten Fällen mit Photonen. In Experimenten ist das Spektrum eines monochromatischen Lichts natürlich verbreitert, was viele Leute verwirrt.
Wir vereinfachen zunächst die Emission von Photonen auf die 1D-harmonische Oszillation von Elektronen. Nehmen wir die Richtung der Oszillation als z-Achse, ist die feste Frequenz
Die Emission eines Photons kann der Wirkung der Strahlungsdämpfungskraft auf das Elektron äquivalent sein. Dann wird die Bewegungsgleichung
Sei (damit Elektronen nicht in die Kerne kollabieren).
Wir definieren
Der Koeffizient zeigt, dass , . Sei .
Behalten wir nur den Term erster Ordnung von .
Dann
Einsetzen
Strahlungsfeld
Definieren wir . Zerlegen in Frequenzkomponenten.
Spektraldichte.
Der Peak liegt bei . Die Breite ergibt sich bei
Dann
11.4 Streuung
In einem Medium ist die Kraft auf ein Elektron in der äußersten Schale eines Atoms, die durch eine einfallende monochromatische ebene Welle ausgeübt wird:
Das Elektron in der äußersten Schale bewegt sich langsam, sodass (nicht-relativistisch). In einer monochromatischen Welle:
Daher können wir den Effekt von vernachlässigen.
Elektrisches Feld einer monochromatischen Welle
Die Bewegungsgleichung
Immer noch oszilliert das Elektron mit einer festen Frequenz. , eingesetzt ergibt
wobei
Ein oszillierendes Elektron und sein Atomrumpf (Kern und andere Elektronen, Ladung ) bilden ein oszillierendes elektrisches Dipolmoment. Sei die Position des Atomrumpfes (Gleichgewichtsposition des Elektrons als Ursprung).
Wir haben die Strahlung eines elektrischen Dipols bereits berechnet (in 9.3)
wobei wir setzen, da die Masse des Atomrumpfes weitaus größer ist als . Weiterhin ist die Stärke der einfallenden Welle
Das Verhältnis von zu wird als Streuquerschnitt bezeichnet.
Es gibt 3 Sonderfälle:
. Rayleigh-Streuung
. Thomson-Streuung
. Resonanzstreuung
11.5 Teilchenstrahlung
Bremsstrahlung
Bremsstrahlung (Dies ist ein deutsches Wort und bedeutet „bremsende Strahlung“) entsteht, wenn ein Teilchen mit Atomen in einem Materialziel kollidiert und plötzlich abgebremst wird. Die kinetische Energie wird in Form von Strahlung emittiert. Betrachten wir nicht-relativistische Fälle .
Mit :
Der Abbremsvorgang ist extrem schnell. Daher wird als konstant betrachtet. Die gesamte Strahlungsenergie:
Dann das Spektrum
Integration über den Raumwinkel:
Auch wegen der sehr schnellen Abbremsung gilt . Unter Fourier-Transformation:
Somit
Allerdings haben wir von bis integriert, wobei negative Frequenzen physikalisch nicht beobachtet werden können und auf positive Frequenzbänder gefaltet werden sollten.
Dieses Ergebnis zeigt, dass das Spektrum der Bremsstrahlung konstant ist. Dies gilt jedoch nur, wenn . Wenn , dann oszilliert
stark aufgrund der schnellen Änderung von . Positive und negative heben sich gegenseitig auf, was zu einem schnellen Abfall bei führt.
Cherenkov-Strahlung
Diese Strahlung wird durch ein geladenes Teilchen verursacht, das sich in einem Medium mit einer Geschwindigkeit bewegt, die die Lichtgeschwindigkeit im Medium überschreitet. Sei der Brechungsindex , Teilchengeschwindigkeit . Die Ladungsdichte , Stromdichte . Das verzögerte Potential
Entfalten des Spektrums
Sei , z-Achse, sodass . Wir konzentrieren uns auf die Fernfeldstrahlung, . Dann
Nur im Nenner beibehalten
Cherenkov-Strahlungskonfiguration
Offensichtlich ist nur bei . Daher wird Strahlung nur bei emittiert. Das Strahlungsfeld ist somit eine Kegelfläche.
Poynting-Vektor
Die gesamte Strahlungsenergie
Einsetzen ergibt das räumliche Spektrum
Die Einführung von ist die Weglänge des Teilchens, um das Quadrat der Delta-Funktion aufzulösen. In der Realität ist immer endlich. Man interessiert sich für die Strahlungsenergie pro Längeneinheit.
Diese Formel wird als Frank-Tamm-Formel bezeichnet. Die Anzahl der abgestrahlten Photonen ist
Übergangsstrahlung
Übergangsstrahlung entsteht, wenn ein geladenes Teilchen die Grenze zwischen zwei isotropen Medien überquert. Betrachten wir den einfachsten Fall: eine geladene Teilchenladung im Vakuum, die sich auf eine geerdete unendliche Leiteroberfläche zubewegt, wobei die Geschwindigkeit senkrecht zur Oberfläche steht. Das Potential kann mit der Spiegelbildmethode gelöst werden:
Angenommen, bei ist . Dann:
Bei erreicht das Teilchen die Ebene. Unmittelbar nach wird das Teilchen abgeschirmt (verschwindet, wird abgebremst). Im Raum überlagern sich die Bremsstrahlung des Teilchens und seines Spiegelbildes.
Die Stromdichte für das Übergangsstrahlungssystem ergibt sich aus der Überlagerung der Ladung des Teilchens und seines Spiegelbildes:
Zerlegung mittels Fourier-Transformation:
Unter der Fernfeldnäherung ist das verzögerte Potential:
Anwendung der Fourier-Transformation mit . repräsentiert die Beobachtungsrichtung.
Angenommen :
Das Spektrum ist daher:
Integration über
Referenzen:
[1] D. J. Griffith, Introduction to Electrodynamics, 4. Aufl. Cambridge: Cambridge University Press, 2017. [2] J. D. Jackson, Classical Electrodynamics, 3. Aufl. New York: Wiley, 1999.