Analoge integrierte Schaltungen

Copyright-Hinweis:
Dieser Artikel ist lizenziert unter CC BY-NC-SA 4.0.
Lizenzinformationen:
- Titel: Analoge integrierte Schaltungen
- Autor: EleCannonic
- Link: https://elecannonic.com/de/kategorie/elektronik/analoge_integrierte/
Die kommerzielle Nutzung dieses Inhalts ist strengstens untersagt. Weitere Details zur Lizenzpolitik finden Sie auf der Seite Über uns.
1. MOS-Bauelemente
1.1 Allgemeine Überlegungen
Ein MOSFET besteht aus einem Gate (Polysilizium), einem Substrat (P/N-Halbleiter), einer Source (N/P-Halbleiter) und einem Drain (N/P-Halbleiter). Source und Drain sind aufgrund ihrer Symmetrie während der Herstellung vertauschbar. Es gibt zwei Arten von MOSFETs: Wenn das Substrat aus einem P-Typ-Halbleiter besteht (und Source und Drain aus einem N-Typ-Halbleiter), handelt es sich um ein NMOS-Bauelement; umgekehrt, wenn das Substrat aus einem N-Typ-Halbleiter besteht (und Source und Drain aus einem P-Typ-Halbleiter), handelt es sich um ein PMOS-Bauelement. Eine typische NMOS-Struktur ist unten dargestellt:
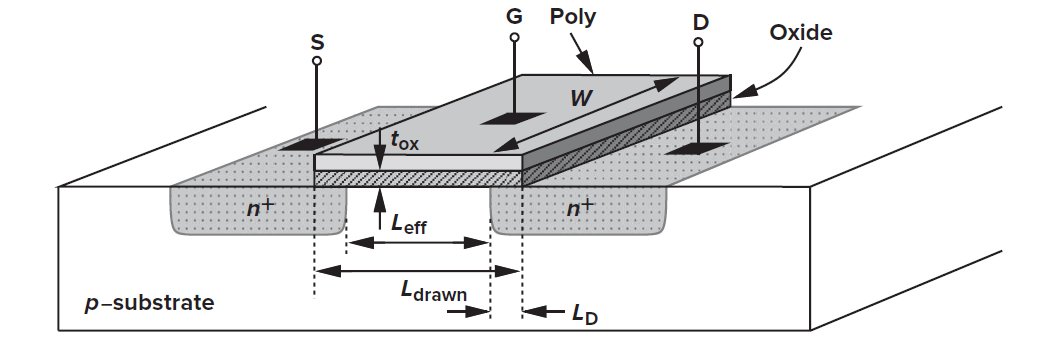
Die laterale Abmessung des Gates entlang des Source-Drain-Pfades wird als Länge
Bei Prozessen mit langen Kanälen kann die Diffusionslänge ignoriert werden, sodass wir
Da Source und Drain symmetrisch sind, bezeichnen wir den Ladungsträgerlieferanten als Source. Zum Beispiel ist bei einem NMOS das Gate mit der niedrigeren Spannung die Source, da es Elektronen liefert, um den Strom zu erzeugen.
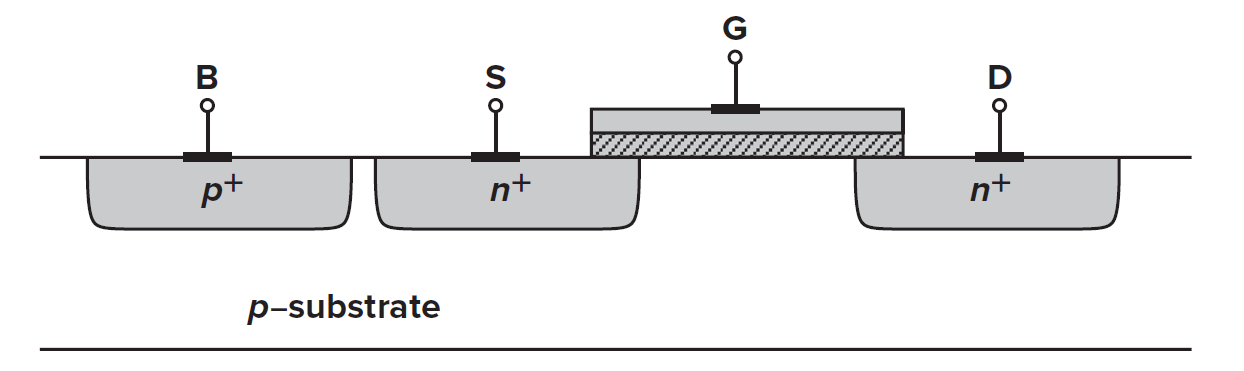
In Wirklichkeit ist ein MOSFET ein 4-poliges Bauelement. Der letzte Pol ist das Substrat. Im typischen MOS-Betrieb muss die S/D-Sperrschicht umgekehrt vorgespannt sein, daher nehmen wir an, dass das globale P-Substrat mit der negativsten Versorgung verbunden ist.
Aber für PMOS ist das Substrat unabhängig, da es einen N-Well auf dem P-Substrat benötigt.
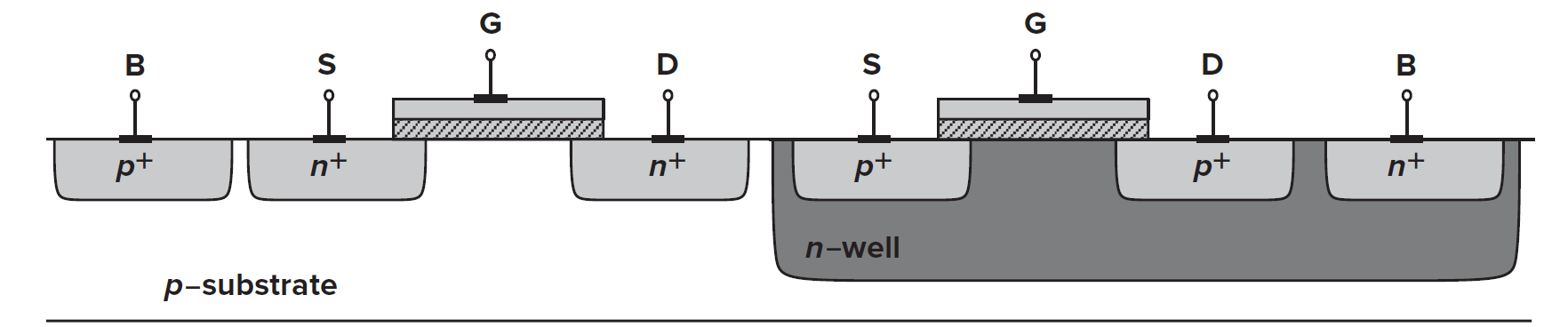
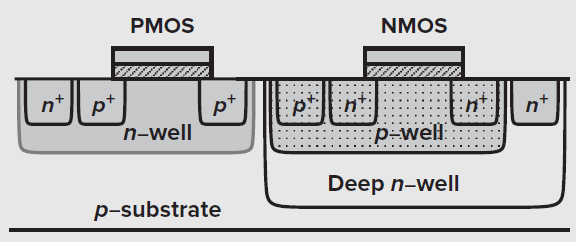
Und in einigen modernen Prozessen fertigen wir zuerst eine tiefe N-Well und dann eine weitere P-Well darin, um einen NMOS zu fabrizieren und das Substrat von anderen Bauelementen zu entkoppeln.
Im Allgemeinen, sofern nicht speziell angegeben, ist das P-Substrat in NMOS mit der niedrigsten Versorgung (negative Versorgung oder GND) verbunden und die N-Well in PMOS mit der höchsten positiven Versorgung. Dann vernachlässigen wir im Symbol den Substratpol standardmäßig.
1.2 MOS I/V-Charakteristiken
MOSFETs haben die Eigenschaft eines Schalters. Nun analysieren wir diese.
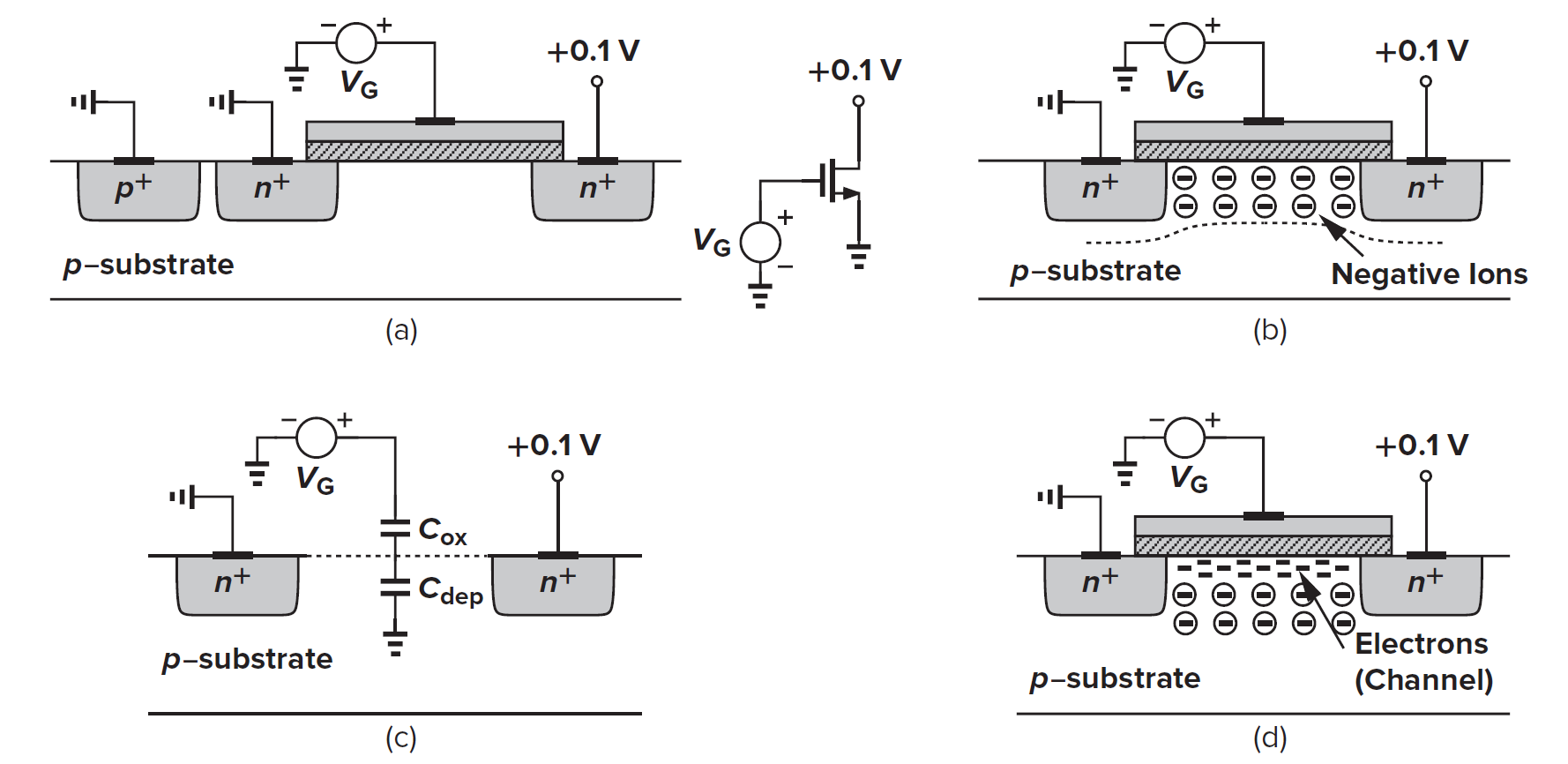
Betrachten wir einen NMOS, der an externe Spannungen angeschlossen ist, wobei die Source mit GND verbunden ist. Wenn die Gate-Spannung
In der Halbleiterphysik kann bewiesen werden, dass
wobei
Bei der Herstellung wird die Schwellenspannung durch Modifizierung der Dotierstoffkonzentration angepasst, um unterschiedliche Anforderungen zu erfüllen.
Die Source muss nicht notwendigerweise mit GND verbunden sein. Daher ist die obige
Für PMOS sind seine Schalteigenschaften ähnlich denen von NMOS, aber in umgekehrter Richtung. Er schaltet ein, wenn
Um die Beziehung zwischen dem Drain-Strom eines MOSFET und seinen Polspannungen zu erhalten, machen wir zwei Beobachtungen.
Erstens, betrachten wir einen Halbleiterstab, der einen Strom
Betrachten wir einen NMOS, dessen Source und Drain beide mit GND verbunden sind, was
Die zusätzliche Spannung
Aber wenn die Drain-Spannung größer als 0 ist, variiert der lokale Unterschied zwischen Gate und Kanal von
wobei
Die negative Zahl kommt vom Elektron.
In Halbleitern gilt
Somit gilt:
Die Randbedingung besagt
Da
Dies ist die I-V-Charakteristik, wenn
Der Spitzenstrom ist:
Wir nennen
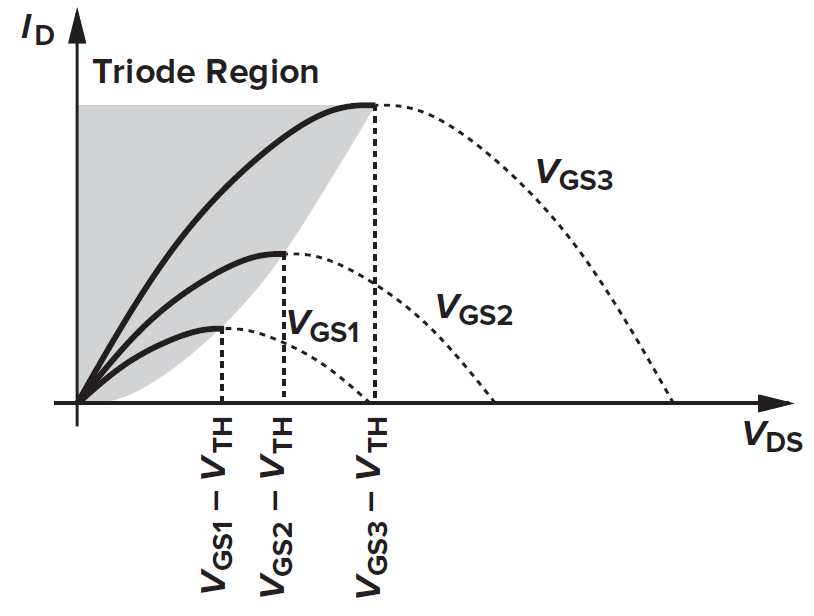
Im Triodenbereich ist die V-I-Kurve annähernd eine Gerade. Daher können wir den äquivalenten Widerstand schätzen, wenn
Aber was passiert, wenn
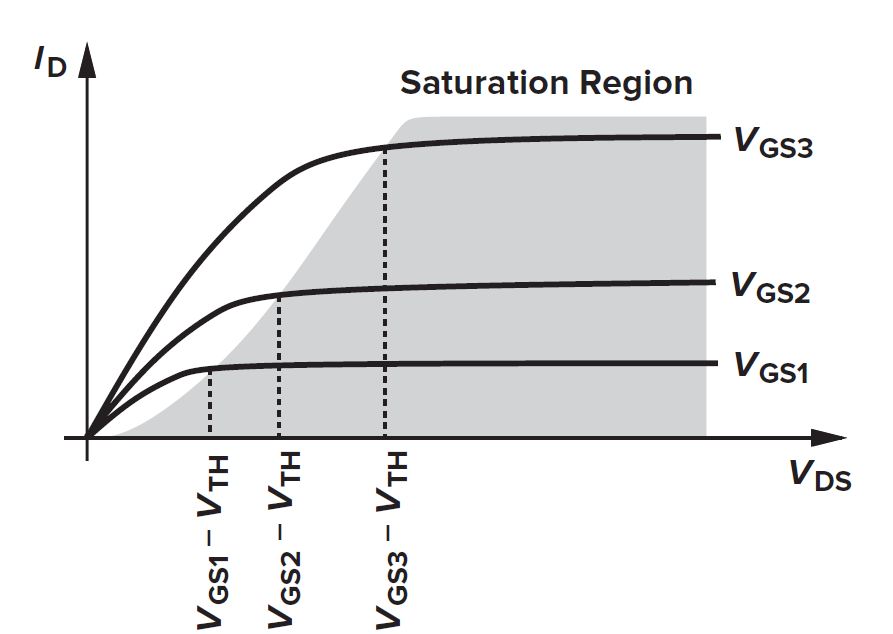
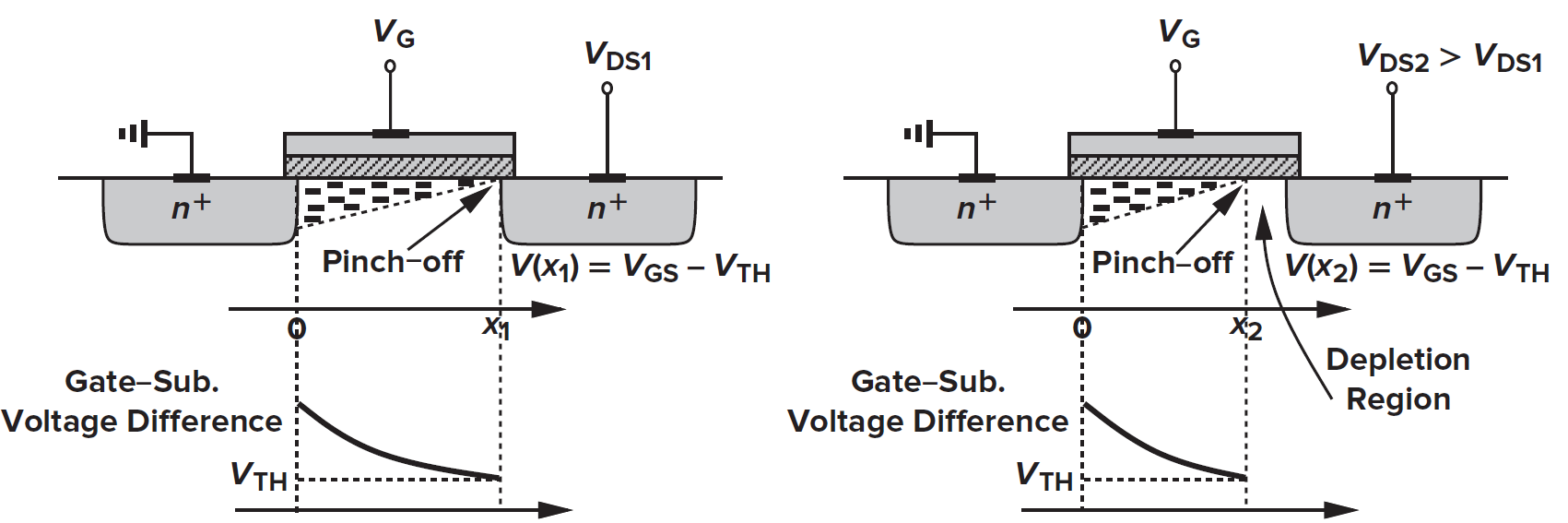
Beachten Sie, dass in der Abbildung die Kanalbreite die Ladungsdichte und nicht die geometrische Breite darstellt. Im Sättigungsbereich ist der Strom fast derselbe wie bei
Wenn
Zusammenfassend:
- Sperrbereich:
, - Triodenbereich:
, , - Sättigungsbereich:
, ,
Ähnlich ist für PMOS die Stromformel:
Das negative Vorzeichen erscheint, weil die Stromrichtung entgegengesetzt zu der von NMOS ist. Bei NMOS fließt
1.3 MOS-Transkonduktanz
Aus den obigen Abschnitten können wir sehen, dass ein MOSFET den Strom
$$
g_m = \dfrac{\partial I_D}{\partial V_{GS}}\bigg|{V{DS} \text{const}} = \mu_n C_{ox} \dfrac{W}{L}(V_{GS} - V_{TH})
$$
Jeder Ausdruck ist nützlich.
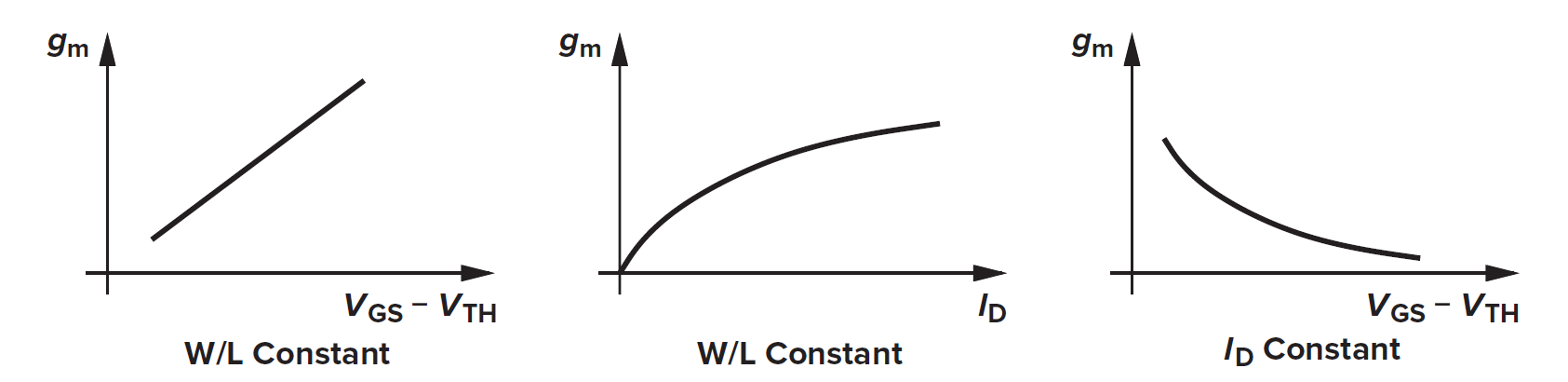
Zum Beispiel wird in der Praxis
1.4 Sekundäre Effekte
- Body-Effekt
In der bisherigen Analyse haben wir stillschweigend angenommen, dass der Bulk und die Source des Transistors mit Masse verbunden waren. Was passiert, wenn die Bulk-Spannung eines NMOS unter die Source-Spannung fällt? Tatsächlich funktioniert der MOS immer noch ordnungsgemäß, aber einige Eigenschaften ändern sich. Erinnern wir uns an die Analyse der Schwellenspannung. Wenn sich die Substratspannung ändert und
Es kann bewiesen werden:
wobei
Da
- Kanal-Längen-Modulation
Erinnern wir uns an den Strom in Sättigung, wo wir
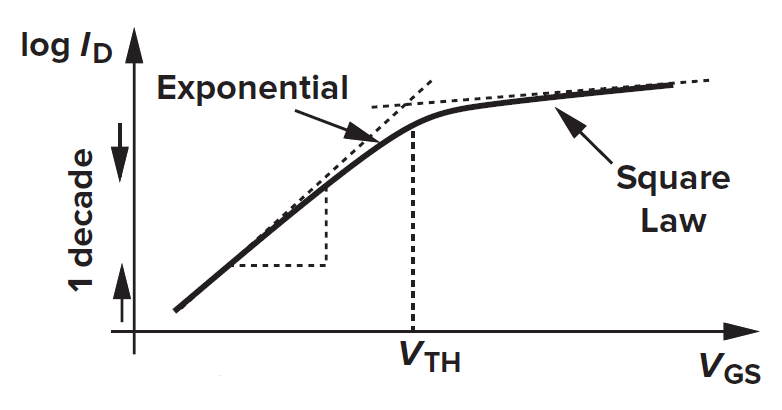
- Subthreshold-Leitung
In Wirklichkeit schaltet das Bauelement nicht abrupt bei
wobei
1.5 MOS-Bauelement-Kapazitäten
Hinweis: Wir bezeichnen “Kapazität” als “Cap.”, um die Beschreibung zu vereinfachen.
Wir wissen, dass es nicht-ideale Kapazitäten in PN-Übergängen gibt. In einem MOS-Bauelement ist die Kapazitätsverteilung wie folgt dargestellt:
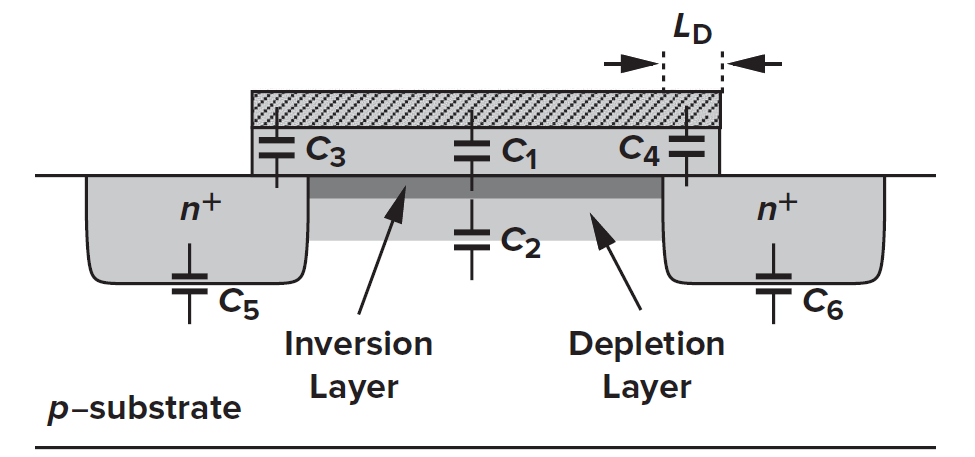
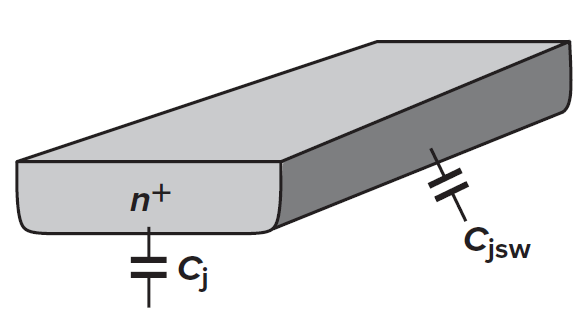
Wir bezeichnen
wobei
wobei
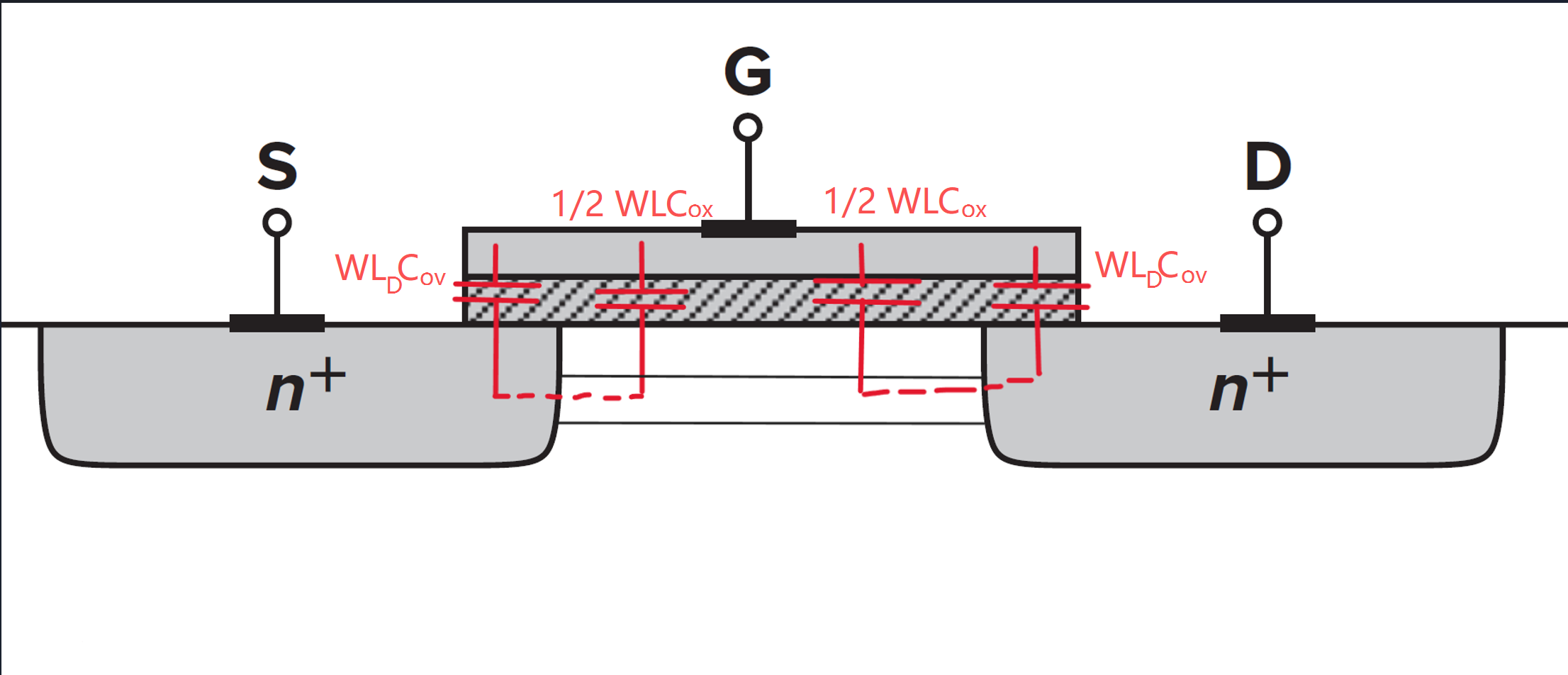
In verschiedenen Bereichen ändern sich die Kapazitäten von MOSFETs. Wenn das Bauelement ausgeschaltet ist, gibt es keine Verbindung zwischen Substrat, Source und Drain. Dann gilt:
Das Symbol
Wenn sich das Bauelement im tiefen Triodenbereich befindet, d.h.
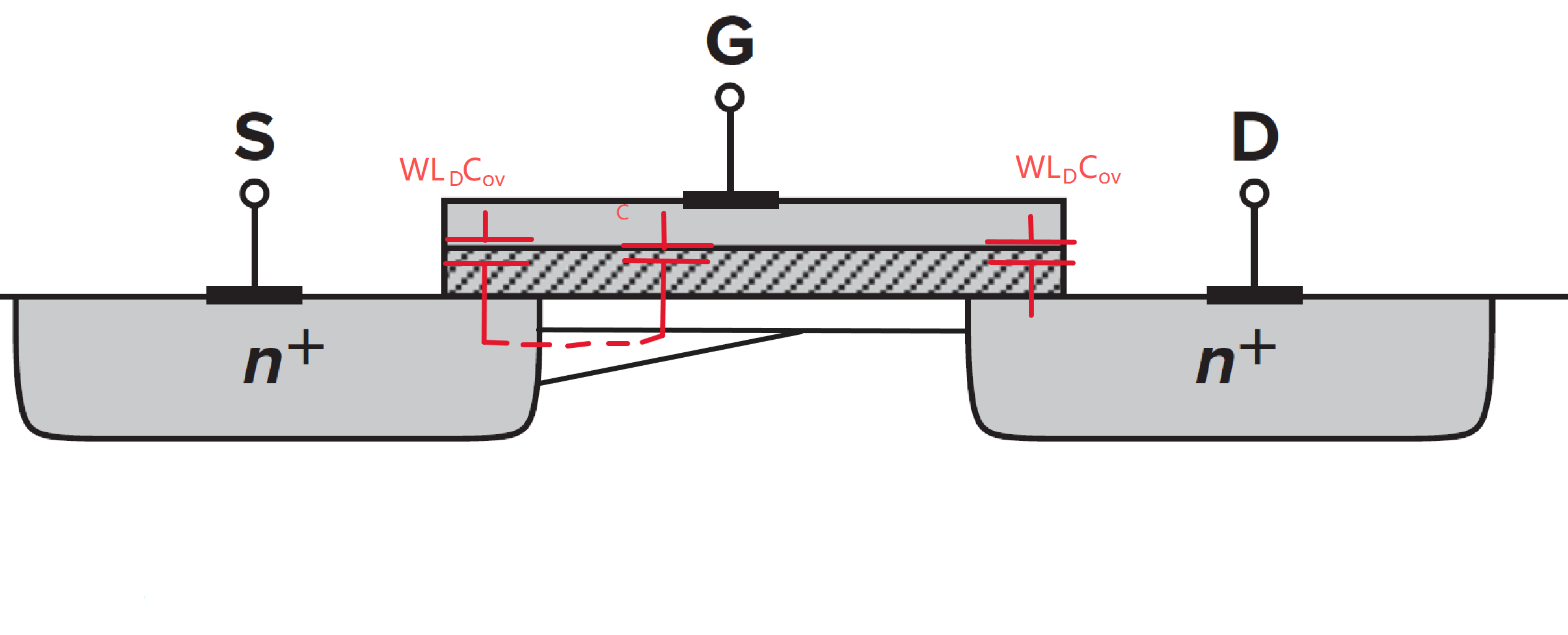
Im Sättigungsbereich ist die Verbindung zwischen Kanal und Drain unterbrochen, sodass
und wenden die Stromgleichung im Sättigungsbereich an:
Wenn die Kanal-Längen-Modulation ignoriert wird, ist
Die Gesamtladung im Kanal ist:
Wenn wir
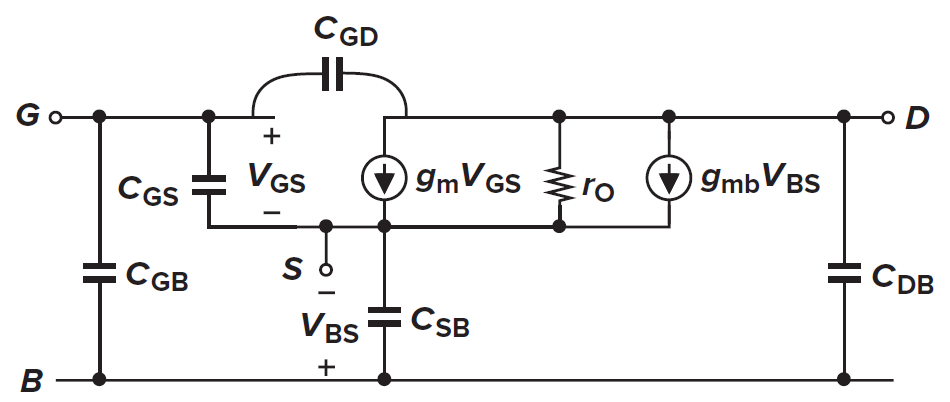
1.6 Kleinsignalmodell
Wenn das Bauelement eingeschaltet ist, werden die Pole D und S als Ausgangspole definiert. Dann ist
Normalerweise ist
Erinnern wir uns, dass das Bulk-Potenzial die Schwellenspannung beeinflussen kann und der Strom auch mit der Schwellenspannung zusammenhängt. Es ist äquivalent, eine Stromquelle hinzuzufügen, die mit
wobei
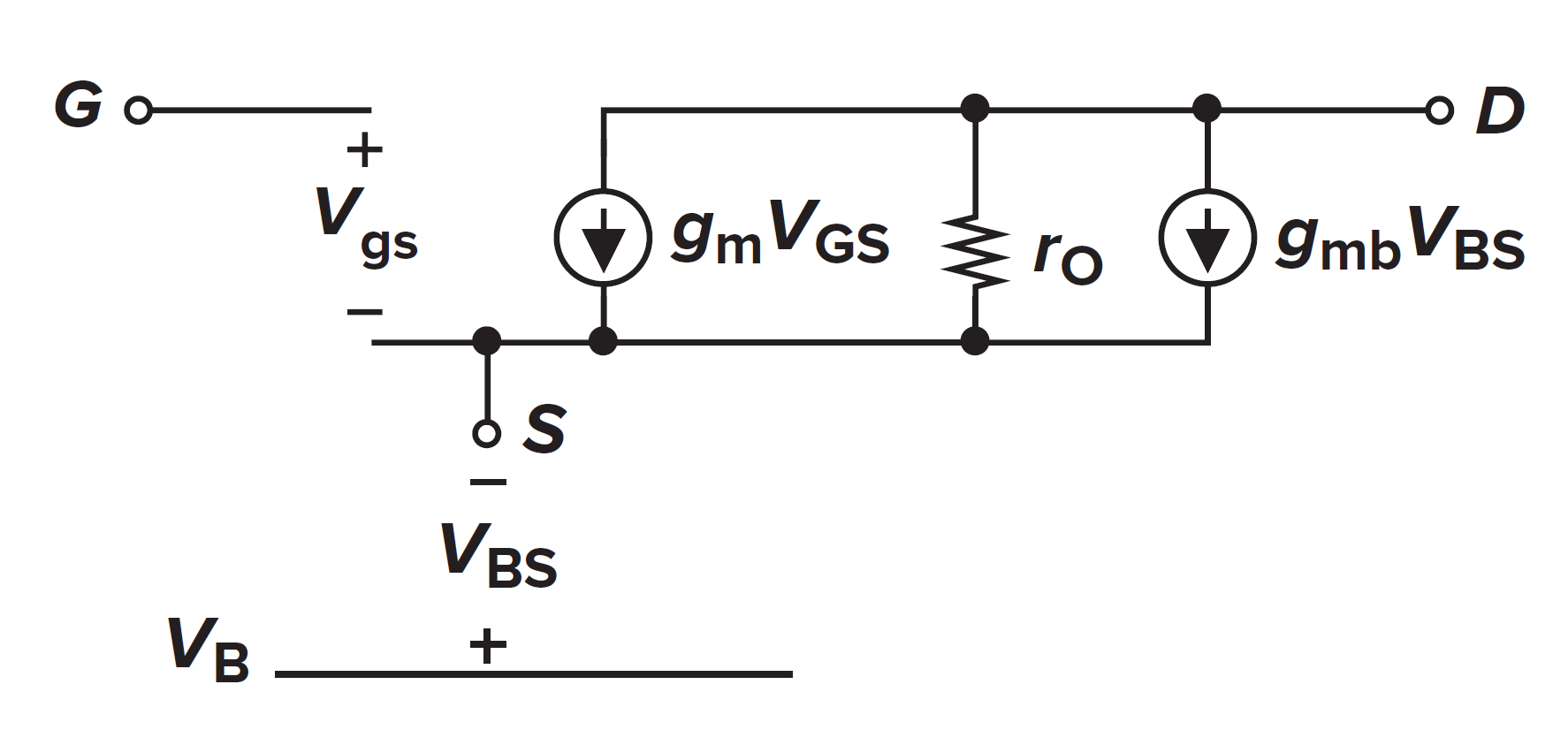
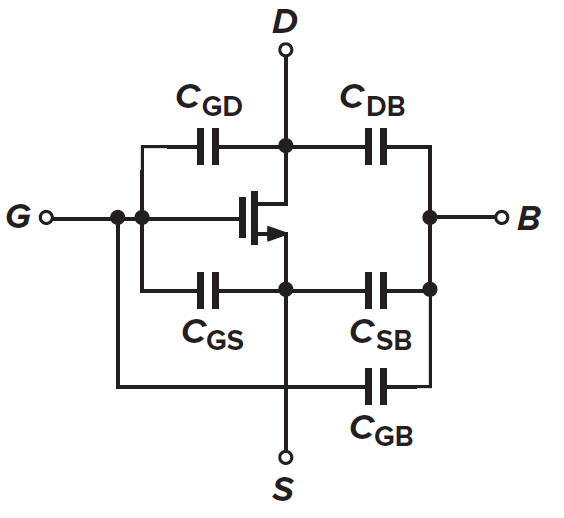
Wenn alle Kapazitäten berücksichtigt werden, sollte das vollständige Wechselstrom-Modell lauten:
Für PMOS-Bauelemente bleiben ihre Wechselstrom-Modelle unverändert, da die Stromversorgungspole in der Wechselstrom-Analyse äquivalent zur Masse sind (Wechselstrom-Erdung). Typischerweise spiegeln wir sie, um sie dem Layout anzupassen, wo PMOS-Bauelemente in Gleichstrom-Schaltungen oben platziert sind.
2. Einstufige Verstärker
Hinweis: In den folgenden Kapiteln bezeichnen wir “KLM” für “Kanal-Längen-Modulation”.
2.1 Allgemeine Überlegungen
Bezeichnen wir das Eingangssignal als
Dieser lineare Koeffizient wird als Verstärkung bezeichnet. In der Realität können wir jedoch keine idealen Dinge herstellen, was bedeutet, dass alle Verstärker Nichtlinearitäten aufweisen. Gemäß der Taylorreihentheorie approximieren wir die Kennlinie durch ein Polynom:
In dieser allgemeinen Beziehung wird
Wir schätzen die Leistung eines Verstärkers anhand der folgenden Indizes: Verstärkung, Geschwindigkeit, E/A-Bereich (I/O-Range), Leistungsdissipation, Versorgungsspannung, Linearität, Rauschen und so weiter. Die meisten davon stehen in einem Kompromiss zueinander, sodass das Design normalerweise ein mehrdimensionales Optimierungsproblem darstellt.
Unser Ziel ist es, kleine Signale zu verstärken. MOS-Bauelemente haben jedoch eine Schwellenspannung und können in verschiedenen Bereichen arbeiten. Daher ist die Einstellung eines geeigneten Gleichstrom-Arbeitspunktes notwendig, um sicherzustellen, dass die Bauelemente in einem gewünschten Bereich arbeiten.
Bevor wir uns spezifischen Verstärkerschaltungen zuwenden, führen wir eine allgemein verwendete Formel zur Berechnung der Verstärkung ein. Wenn ein System eine Gesamt-Transkonduktanz
Sie finden möglicherweise ein zusätzliches negatives Vorzeichen in einigen Lehrbüchern, da dort eine andere Definition angewendet wird. Sie erzwingen eine positive Transkonduktanz zur Vereinfachung und müssen daher ein zusätzliches “-“ hinzufügen, um anzuzeigen, dass das System eine “invertierte Phase” erzeugt. In unserer Definition ist das Vorzeichen in
Die Formel ist leicht zu beweisen. Gemäß der Definition
Da ein MOSFET auch als Verstärkerbauelement betrachtet werden kann, definieren wir
als seine intrinsische Verstärkung, um seine Verstärkungsfähigkeit darzustellen.
2.2 Common-Source-Stufe (CS)
2.2.1 CS mit Widerstands-Last
Ein MOSFET wandelt sein Eingangsspannungssignal am Gate in ein Stromsignal um. Mit einem Lastwiderstand wird der Strom wieder in ein Spannungssignal umgewandelt. Diese grundlegende Idee führt zum Common-Source (CS)-Verstärker.
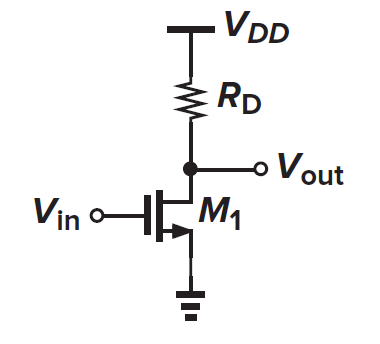
Wir erwarten, dass das Bauelement im Sättigungsbereich arbeitet und vernachlässigen KLM. Der Gleichstrom-Arbeitspunkt wird durch die Gleichstrom-Komponente in
Die beiden Gleichungen gelten im Sättigungsbereich. Beachten Sie, dass
- Sperr (Cut-off):
- Treib (Triode):
Im Sperrbereich, wo
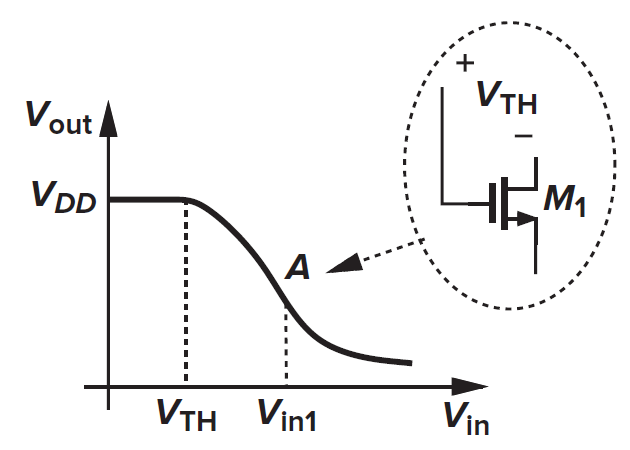
Da die Transkonduktanz im Treibbereich abnimmt, stellen wir normalerweise sicher, dass
Wir haben drei Methoden zur Berechnung der Spannungsverstärkung:
- Partielle Ableitung der Gleichstrom-Formel
Denken Sie daran, dass
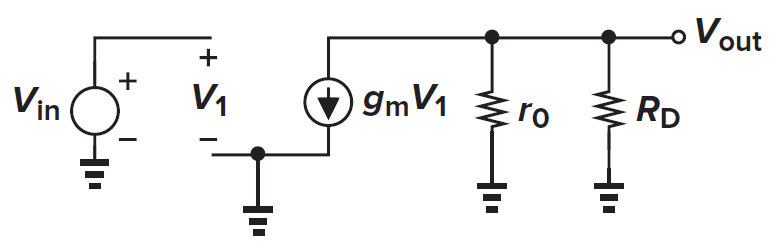
- Analyse des Kleinsignalmodells

- Direkte Anwendung der allgemeinen Formel
Wenn nun KLM berücksichtigt wird, bedeutet dies, dass
Da
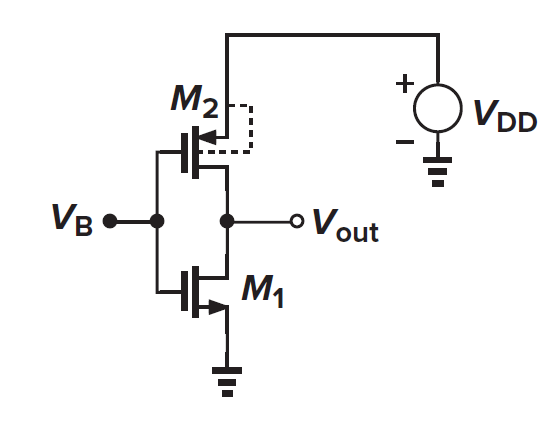
2.2.2 CS-Stufe mit Dioden-verkoppelter Last
Die grundlegende CS-Topologie hat einige Probleme:
Das schwerwiegendste Problem ist die Nichtlinearität, die hauptsächlich durch die Variation von
Da
Aber die Stromquelle ist nicht ideal umsetzbar. Wenn die Stromquelle ideal ist, ist der Gleichstrom-Arbeitspunkt nicht genau definiert. Sie können versuchen, die Ausgangsspannung
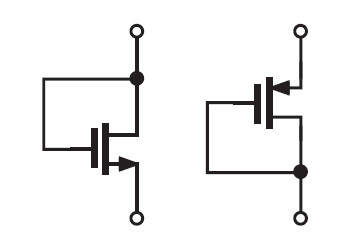
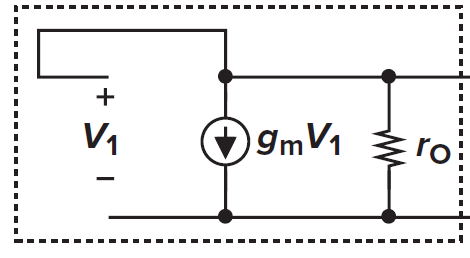
Wenn das Bauelement so verschaltet ist, gilt
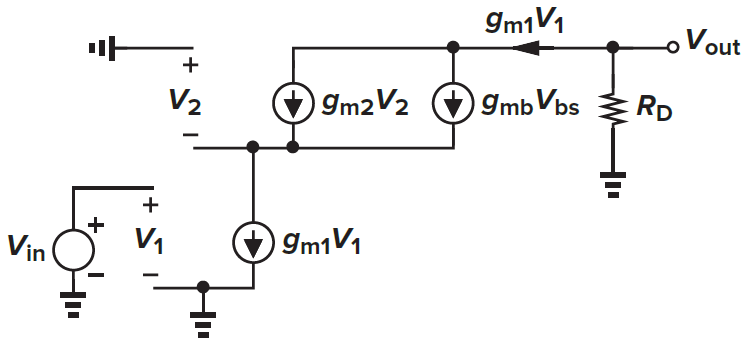
Sie können das Kleinsignalmodell ermitteln
Wenn ein NMOS als Last dient, müssen wir den Körpereffekt berücksichtigen.
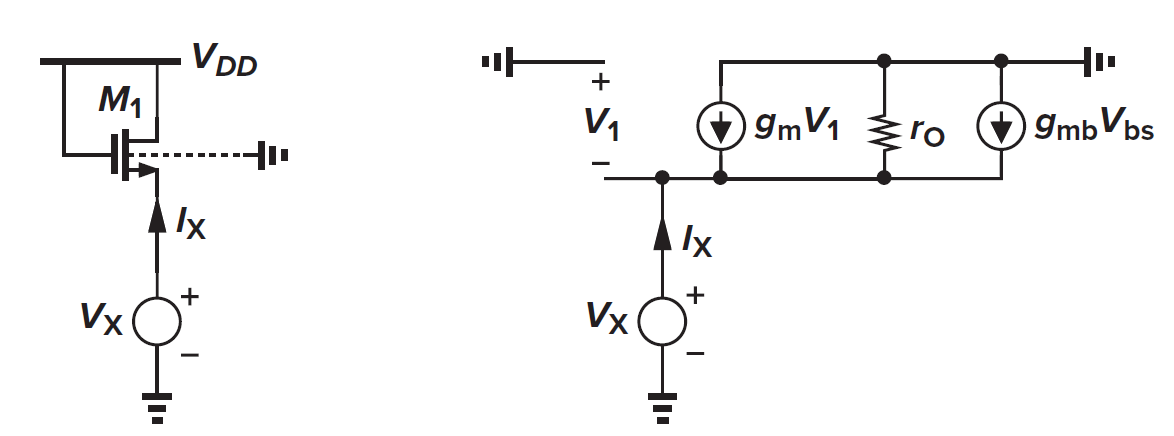
Ausgehend vom Source-Anschluss listen wir die Stromgleichung auf:
Lösen Sie die Gleichung und berechnen Sie die Impedanz
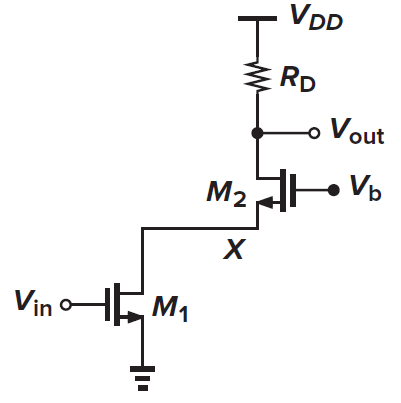
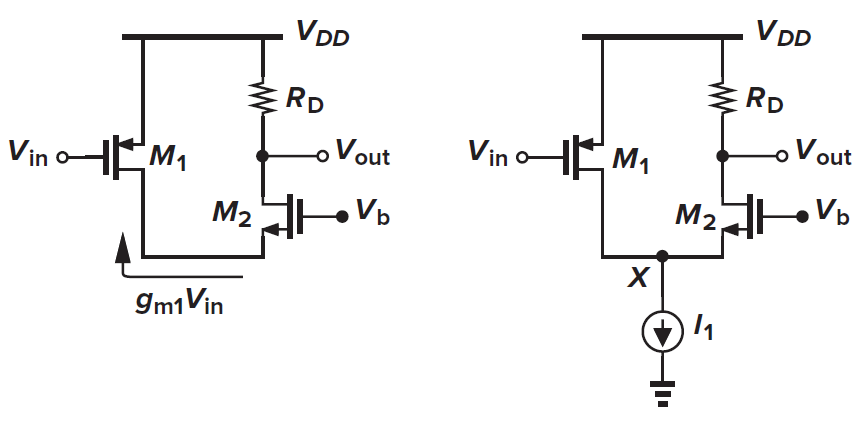
Wir untersuchen nun den CS-Verstärker mit einer NMOS-Last. Vernachlässigen Sie zunächst KLM.
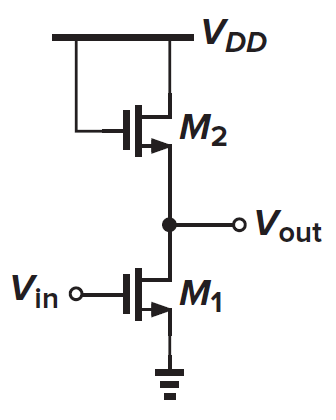
Vom Ausgangsanschluss liefert M2 eine Impedanz von
wobei
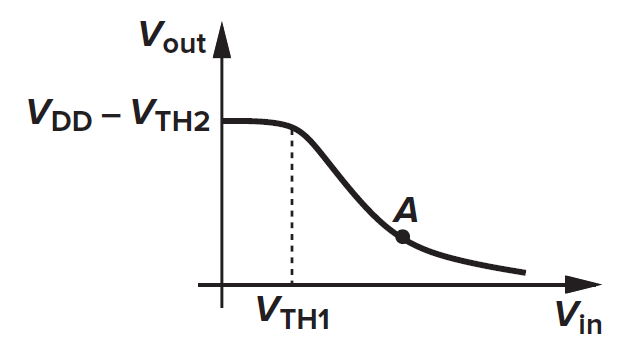
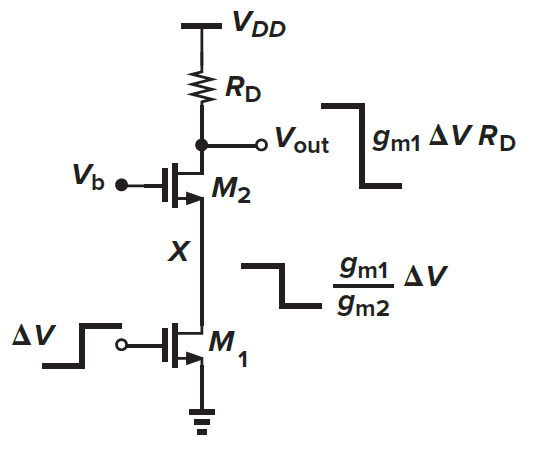
Das lineare Verhalten der Schaltung kann auch durch eine Großsignal-Analyse bestätigt werden.
und daher
Leiten Sie beide Seiten nach
Wenden Sie die Kettenregel an.
Dann
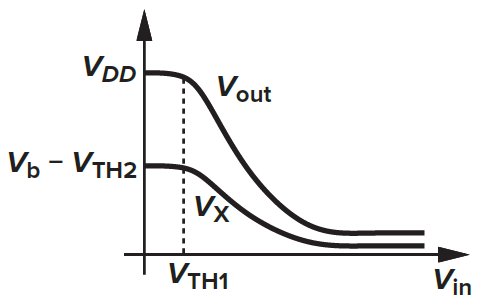
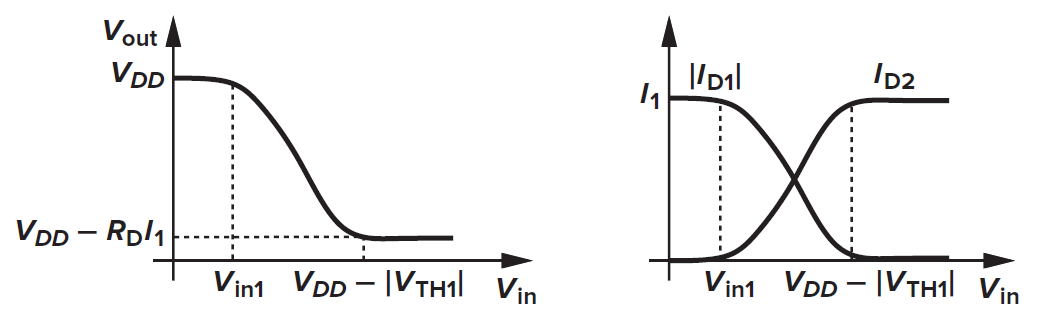
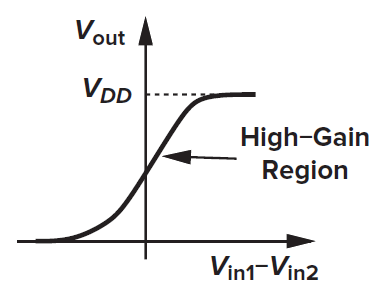
Es ist lehrreich, auch die gesamte Großsignal-Kennlinie der Schaltung zu untersuchen. Betrachten wir jedoch zunächst die Schaltung mit einer Kapazitätslast. Was ist der Endwert von
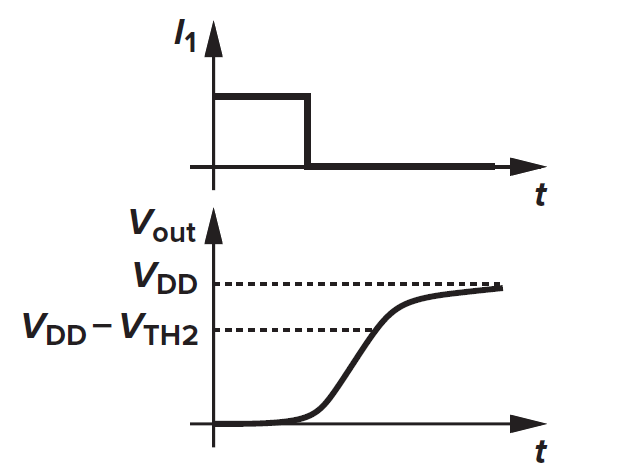
Die folgende Abbildung zeigt die
Wenn die Last mit einem PMOS implementiert wird, verschwindet der Körpereffekt und die Verstärkung ist linearer.
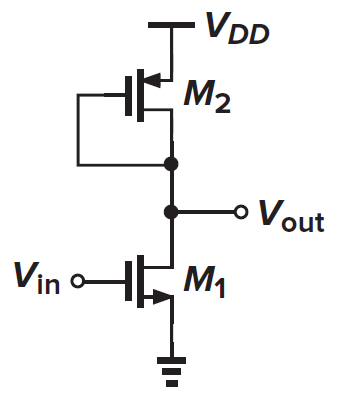
Mit dem Verschwinden von
wenn KLM vernachlässigt wird. Wenn KLM berücksichtigt wird, wird die Verstärkung abhängig von
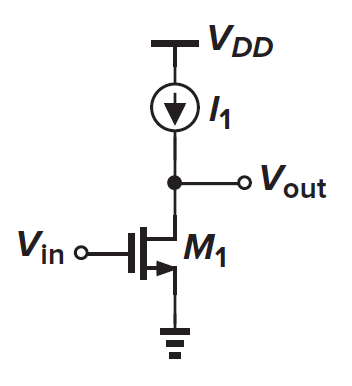
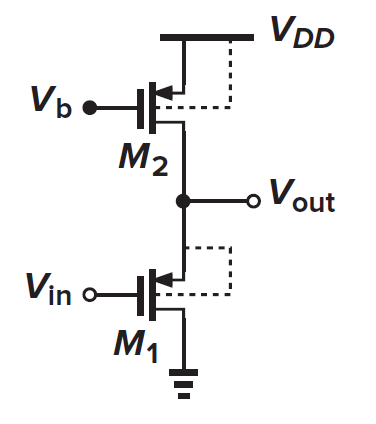
2.2.3 CS-Stufe mit Stromquellen-Last
Eine weitere Methode zur Stabilisierung des Gleichstrom-Arbeitspunktes ist das Hinzufügen einer zusätzlichen Vorspannung zur Ersetzung der dioden-verschalteten MOS.
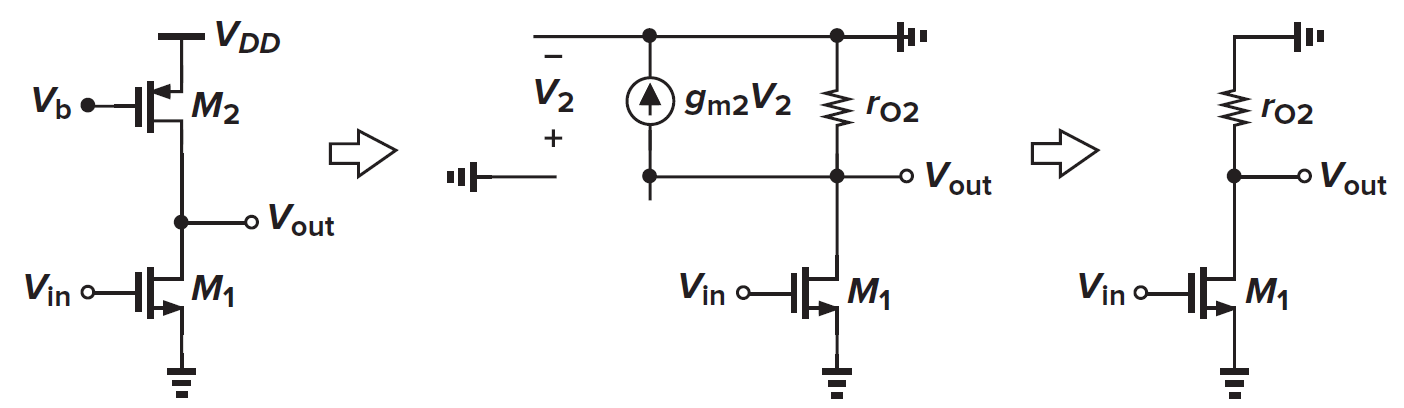
Offensichtlich ist die Gesamtimpedanz
wenn M2 im Sättigungsbereich vorgespannt ist. Allerdings ist
Die KCL-Gleichung
Wenn der MOSFET oben im Treibbereich vorgespannt ist, ist er fast identisch mit der ursprünglichen, nicht optimierten Schaltung. Ein Vorteil der Vorspannung im Treibbereich ist, dass Sie den Widerstandswert durch Anpassen von
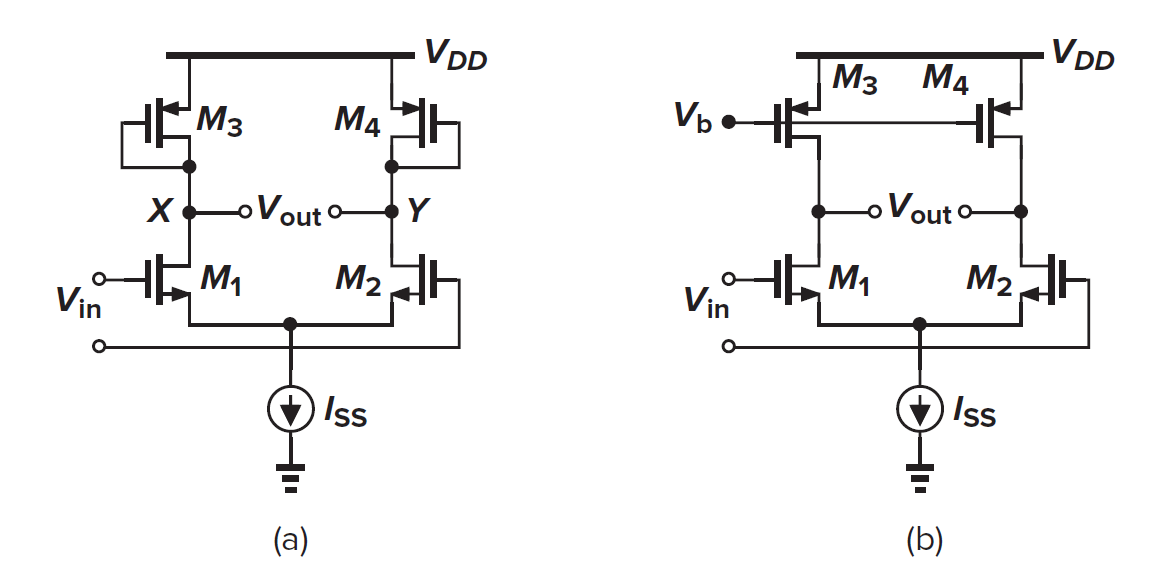
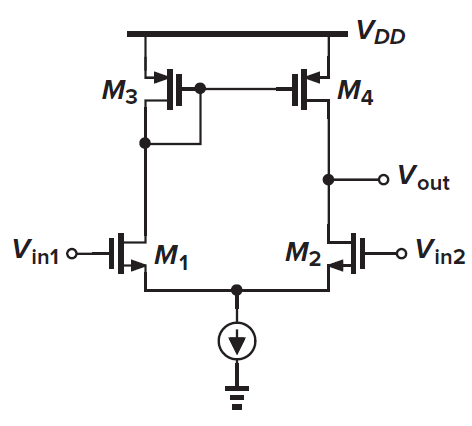
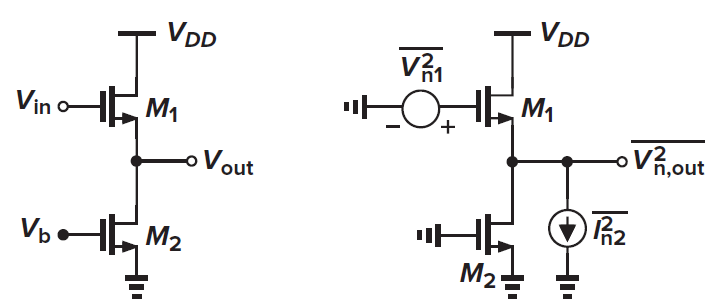
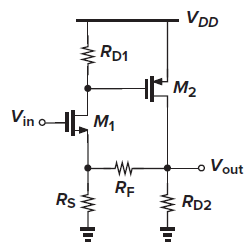
2.2.4 CS-Stufe mit aktiver Last
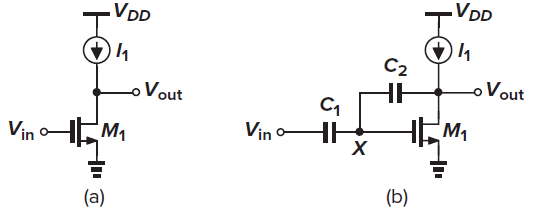
Wenn ein MOS nur die Vorspannung liefert, scheint die Verstärkung dieses MOS verschwendet zu werden. Können wir beide Röhren voll ausnutzen? Ja. Die Topologie wird als kompensierter CS bezeichnet, auch bekannt als CMOS-Inverter.
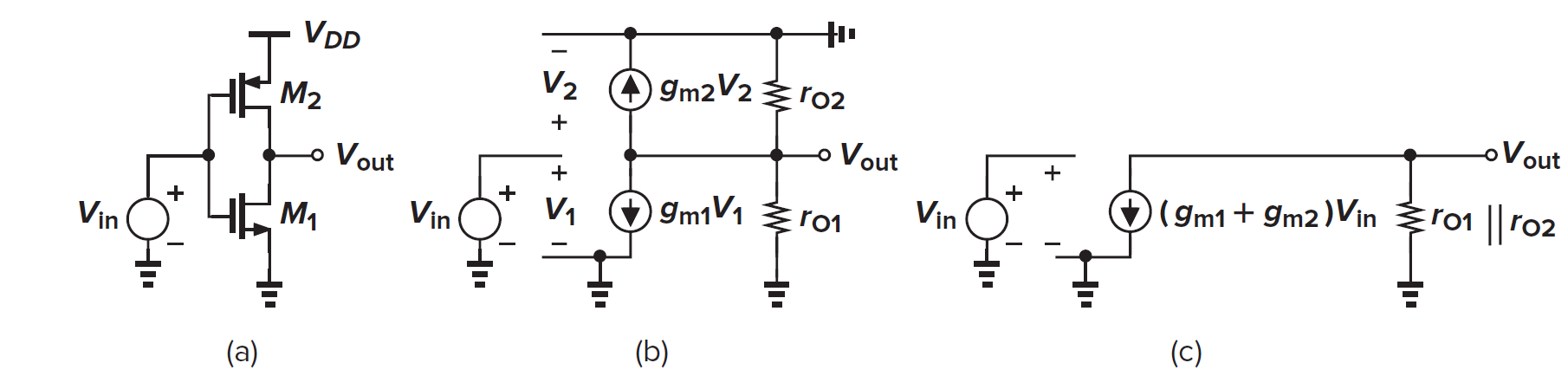
Aus dem Kleinsignalmodell in Abbildung (b) ist die Eingangs-Transkonduktanz
Der CMOS-Inverter muss zwei kritische Probleme lösen, wenn er als Verstärker dient: Erstens ist der Arbeitspunktstrom der beiden Transistoren stark von PVT (Prozessdrift, Spannungsdrift, Temperaturdrift, die drei Parameter beeinflussen die Leistung und können nicht kontrolliert werden) abhängig. Insbesondere da
Und der Eingangsbereich ist sehr klein. Der CMOS-Inverter opfert Power Noise und Eingangsbereich für eine höhere Verstärkung. Daher wird diese Topologie häufig in digitalen Schaltungen und selten in analogen Schaltungen verwendet.
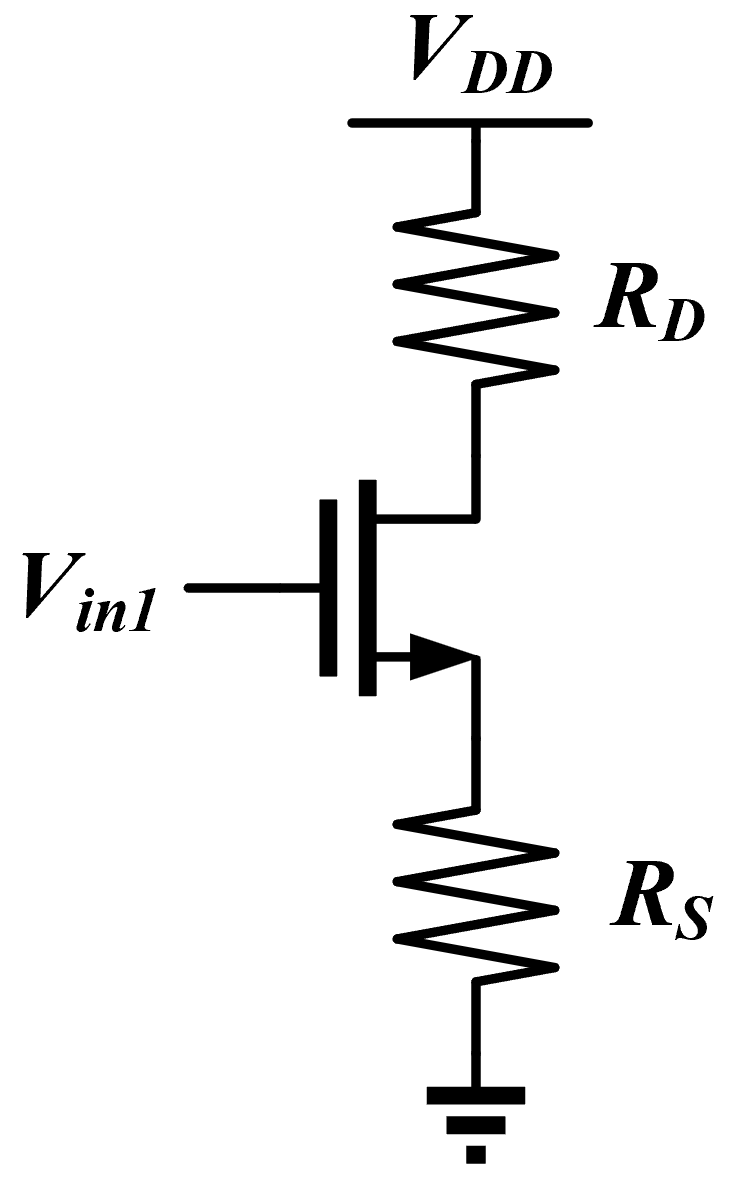
2.2.5 Source Degeneration
In einigen Anwendungen führt die nichtlineare Abhängigkeit des Drainstroms von der Übersteuerungsspannung zu übermäßiger Nichtlinearität. Durch Platzieren eines “Degenerations”-Widerstands in Reihe mit dem Source-Anschluss können wir das Eingangsbauelement linearer machen.
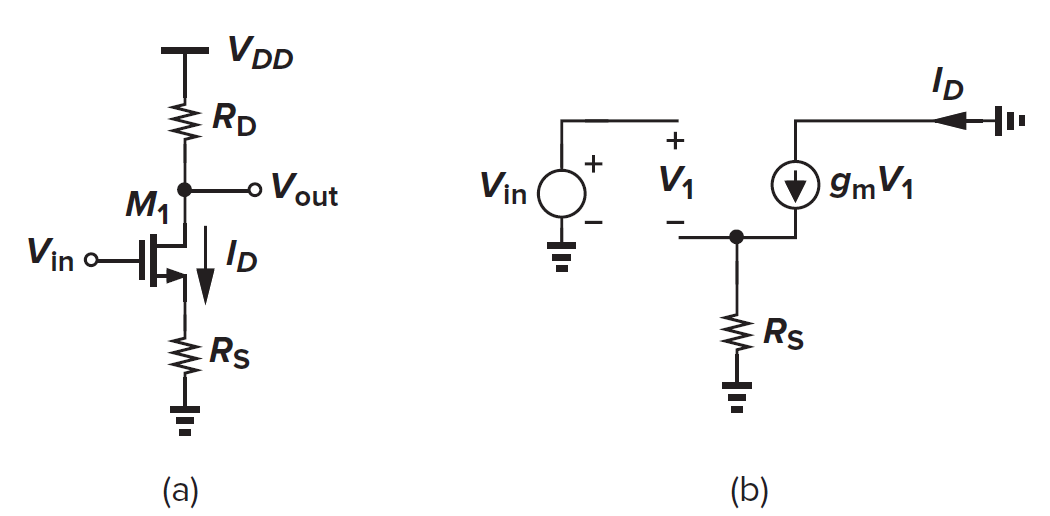
Vernachlässigen Sie KLM und Körpereffekt. Hier, wenn
Eine andere Sichtweise ist die Transkonduktanz.
Dann
Der Source-Degenerationswiderstand fügt der Gesamttranskonduktanz einen zusätzlichen
Die Wechselstrom-Verstärkung ist
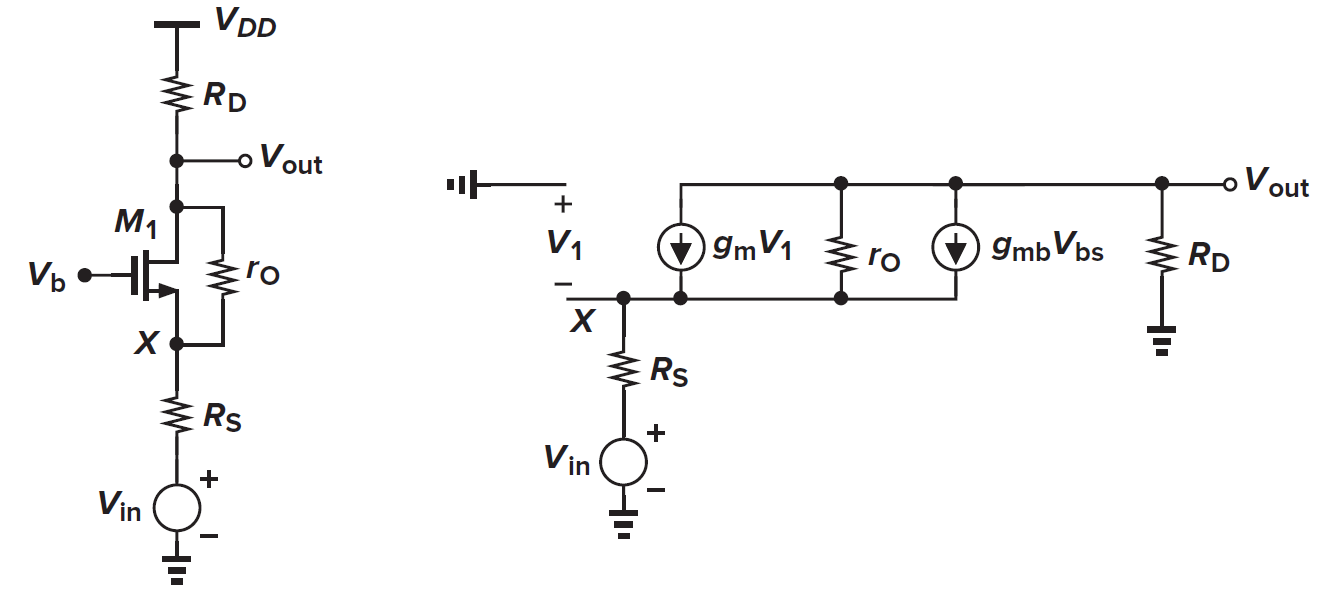
Wenn KLM und Körpereffekt nicht vernachlässigt werden, ist das Kleinsignalmodell wie folgt dargestellt:
Es kann bewiesen werden, dass
2.3 Common-Drain-Stufe (Source-Folger, SF)
Unsere Analyse der Common-Source-Stufe zeigt, dass die Lastimpedanz so groß wie möglich sein muss, um eine hohe Spannungsverstärkung bei begrenzter Versorgungsspannung zu erreichen. Wenn eine solche Stufe eine niederohmige Last treiben soll, muss ein „Puffer“ nach dem Verstärker platziert werden, um die Last mit vernachlässigbarer Reduzierung der Verstärkung zu treiben. Der Source-Folger (auch „Common-Drain“-Stufe genannt) kann als Spannuspuffer fungieren.
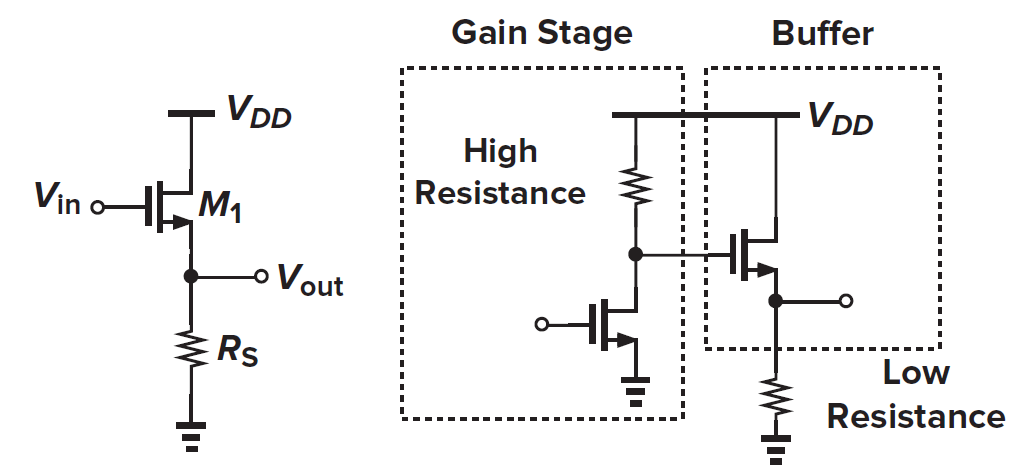
Wir wissen, dass die CS-Stufe eine hohe Ausgangsimpedanz hat, die hauptsächlich durch den Lastwiderstand begrenzt ist. Wenn die Eingangsimpedanz der nächsten Stufe klein ist, kann die Ausgangsspannung abfallen, sodass nur ein Teil des Signals in die nächste Stufe gelangt. Durch den Einsatz eines Source-Folgers verringert sich die Gesamtausgangsimpedanz (Anm.: im Original steht fälschlicherweise „increase“), wodurch eine bessere Treiberfähigkeit erreicht wird.
Wir stellen fest, dass für
wenn CLM vernachlässigt wird. Durch Ableiten nach
erhalten wir:
Eingesetzt für die Steilheit
Unter Verwendung des Kleinsignalmodells ist die Schlussfolgerung einfacher:
Wenn
Aus ähnlichen Gründen wie bei der CS-Stufe können wir
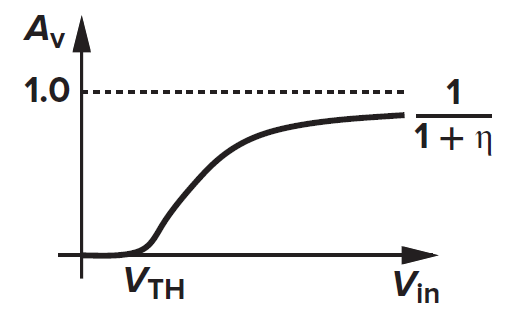
Normalerweise wird die Stromquelle mit einem vorgespannten MOS realisiert. Setzt man die beiden Stromgleichungen gleich:
Wir sehen, dass der Eingang und Ausgang weitgehend linear sind:
Wir wenden eine Rückkopplungsschleife an, um
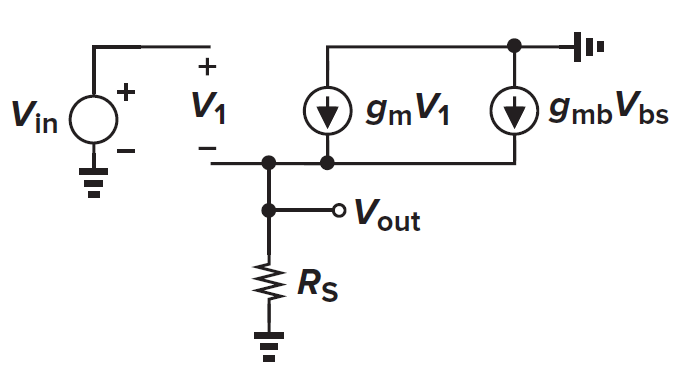
Offensichtlich hat der SF eine hohe Eingangsimpedanz. Wir prüfen die Ausgangsimpedanz für den SF mit einer Stromquelle als Last.
Am Source-Punkt gilt:
was ergibt:
Da
Wir wissen, dass der Substrateffekt (Body-Effekt) einen Teil der Nichtlinearität verursacht. Dies kann gelöst werden, wenn das Bulk mit dem Source verbunden wird, was bedeutet, dass alle MOS-Transistoren durch PMOS ersetzt werden.
Wir müssen alle Bauelemente ersetzen, da alle NMOS-Transistoren das gleiche Substratpotenzial GND teilen. Diese Topologie weist weniger Nichtlinearität auf, aber die geringere Beweglichkeit von PMOS führt auch zu einer höheren Ausgangsimpedanz.
Source-Folger verschieben auch den DC-Pegel des Signals um
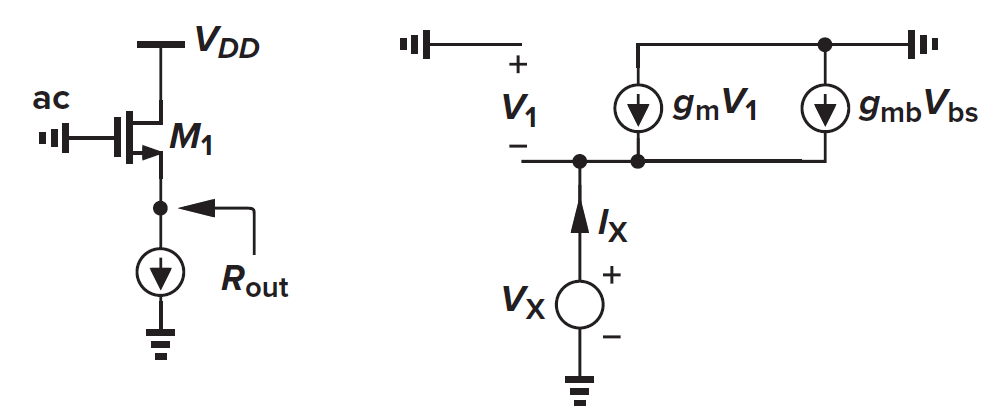
2.4 Common-Gate-Stufe (CG)
Es ist auch möglich, das Signal an den Source-Anschluss anzulegen.
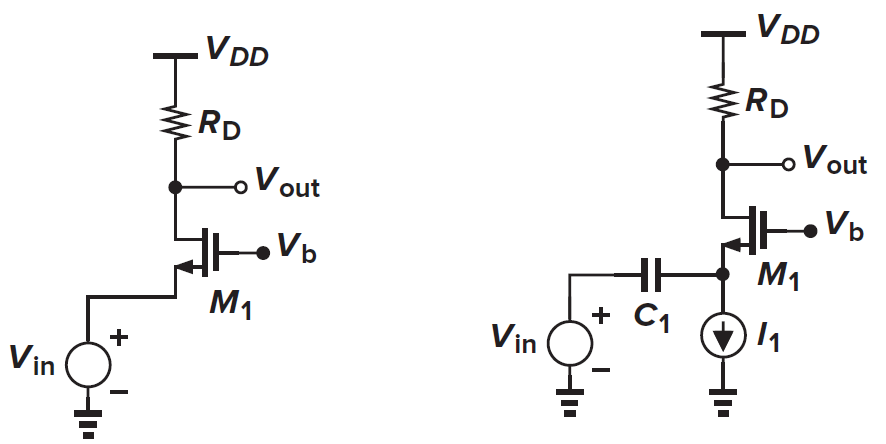
Beachten Sie, dass Sie für
Wir untersuchen zunächst wieder die DC-Charakteristik. Betrachten wir die direkt gekoppelte Topologie: Wenn
und
Offensichtlich sinkt mit abnehmendem
Wenn
Interessanterweise erhöht der Body-Effekt die äquivalente Steilheit der Stufe. Aus der Gleichung geht hervor, dass wir
In der kapazitiv gekoppelten Topologie entspricht der minimal zulässige Pegel von
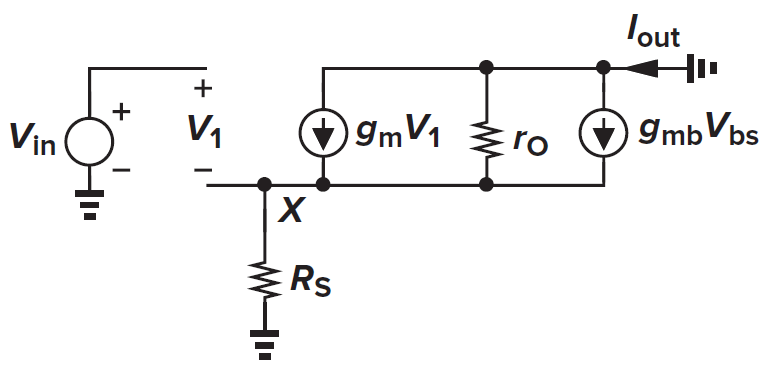
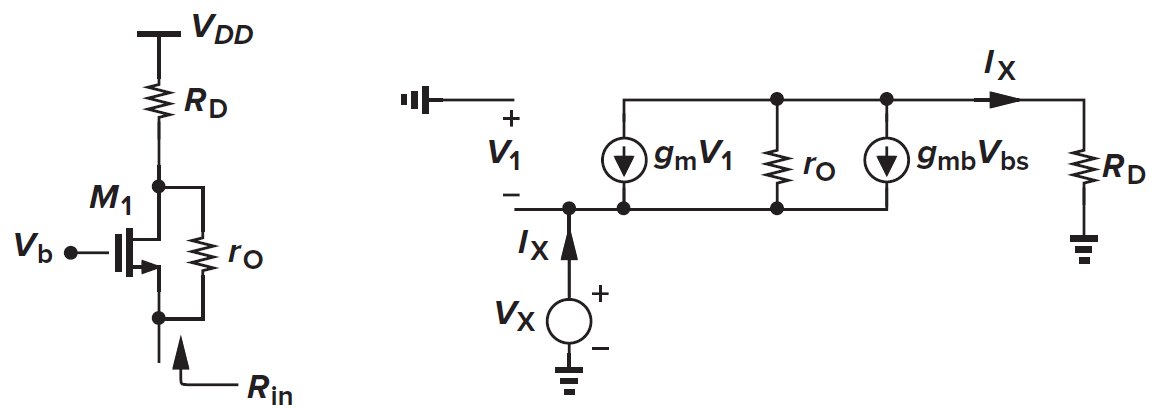
Hinsichtlich der Eingangsimpedanz stellen wir fest, dass bei Vernachlässigung der Kanallängenmodulation (CLM) die an der Source von M1 gesehene Impedanz gleich
Wenn wir das Kleinsignalmodell zeichnen, wird das Ergebnis dasselbe sein. Angenommen, die Stromquelle hat einen endlichen Widerstand (da sonst der DC-Punkt nicht gut definiert wäre). Das Kleinsignalmodell sollte dann so aussehen:
Durch einfaches Anwenden von KCL erhalten Sie:
Die Verstärkung der Common-Gate-Stufe ist aufgrund des Body-Effekts etwas höher.
Wir berechnen nun die Eingangs- und Ausgangsimpedanz getrennt.
Am Knoten X:
Daraus folgt:
Da üblicherweise
Anschließend setzen wir die Eingangsspannung auf 0, behalten aber die Source-Impedanz bei, um die Ausgangsimpedanz zu berechnen.
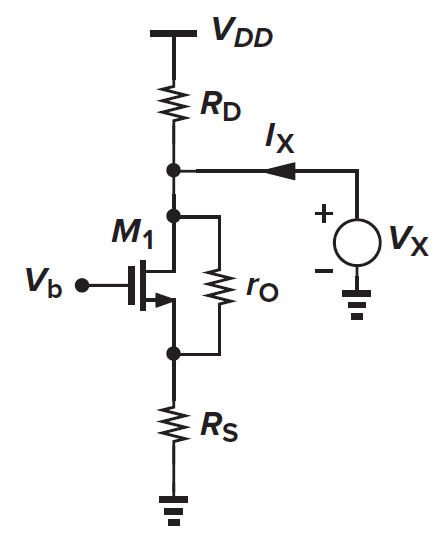
Zeichnen Sie das Kleinsignalmodell und stellen Sie KCL am Source-Anschluss auf:
Dies ergibt:
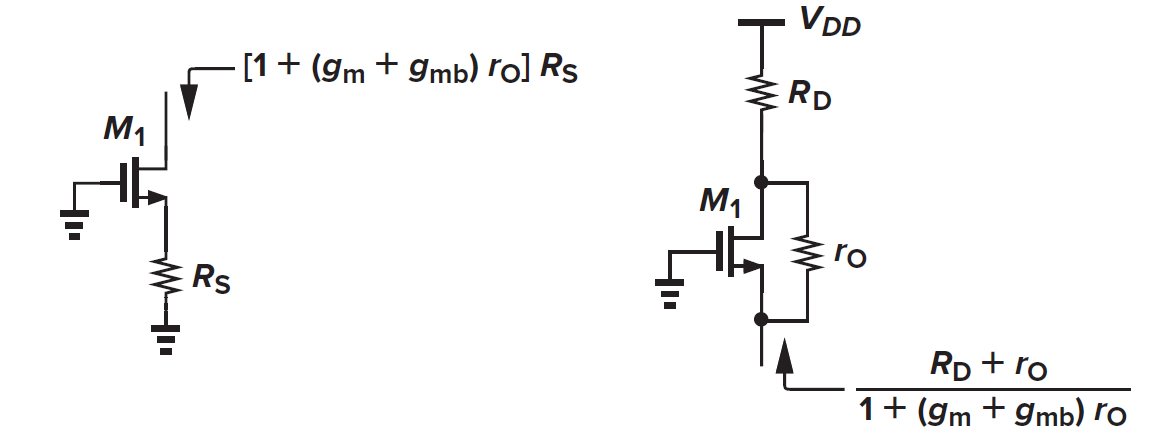
Dies ist ein sehr hoher Wert. Folglich besitzt die CG-Stufe eine niedrige Eingangsimpedanz und eine hohe Ausgangsimpedanz. Diese Impedanzcharakteristik eignet sich gut für den Einsatz als Strompuffer oder Impedanzwandler. Wir sagen vereinfacht, dass ein Transistor seinen Source-Widerstand nach oben und seinen Drain-Widerstand nach unten transformiert (wenn man am entsprechenden Anschluss misst).
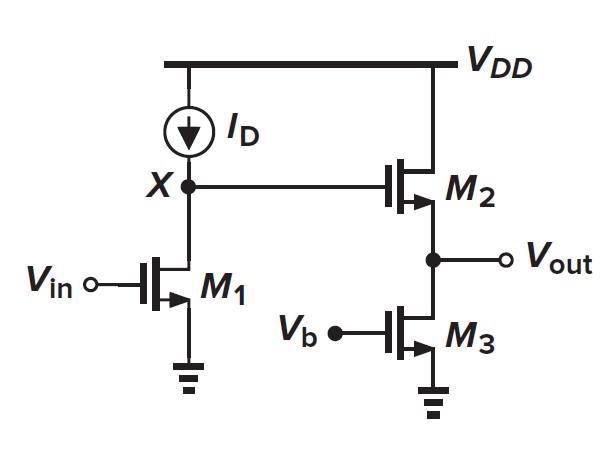
2.5 Kaskode
2.5.1 Klassische Kaskode
Wie im letzten Abschnitt erwähnt, eignet sich die CG-Stufe gut für den Empfang eines Stromeingangs. Wir wissen auch, dass die CS-Topologie einen Spannungseingang in einen Ausgangsstrom umwandelt. Die Kaskadierung von CG und CS wird als Kaskode-Topologie bezeichnet.
Anstatt das Kleinsignalmodell zu verwenden (was natürlich möglich ist), betrachten wir die Bauelemente anhand ihres spezifischen Verhaltens. Unter Vernachlässigung von Kanallängenmodulation (KLM) und Body-Effekt untersuchen wir kleine Variationen von
Wenn sich
Bisher haben wir die AC-Verstärkung ermittelt, ohne das Kleinsignalmodell explizit anzuwenden. Eine solche Analyse ist in komplexen Systemen viel praktischer. Wie Sie sich vorstellen können, ist es mühsam und fast unmöglich, Kleinsignalmodelle für einen großskaligen Analog-Chip mit Hunderten von MOSFETs zu zeichnen.
Untersuchen wir nun die Störung an M2, während das Eingangssignal an M1 auf einem konstanten DC-Pegel gehalten wird. In diesem Fall arbeitet M1 als konstante DC-Stromquelle. Egal wie sich
Da sich
Um beide Bauelemente in Sättigung (Sat.) zu betreiben, müssen wir garantieren, dass
Damit M2 gesättigt ist, muss
Einer der Nachteile der Kaskode ist, dass der Ausgangsspannungshub (Output Swing) begrenzt ist.
Wir analysieren nun das Großsignalverhalten der Kaskodestufe, wenn
Sobald
Wir zeichnen dennoch das Kleinsignalmodell, um die Gesamtsteilheit und die Ausgangsimpedanz zu finden.
Da der gesamte Strom durch
Angenommen, die AC-Spannung an der Source von M2 ist
Daraus folgt:
Dies ist ein sehr großer Wert. Daher eignet sich die Kaskode gut, um einen Spannungseingang zu empfangen und einen Stromausgang zu liefern.
Beachten Sie, dass die Ausgangsimpedanz von M1 am Drain
Schließlich erhalten wir die AC-Verstärkung:
Die Kaskode nutzt die Eigenverstärkung beider Bauelemente voll aus. Wenn die beiden Bauelemente identisch sind, gilt:
Wenn der Body-Effekt nicht vernachlässigbar ist, gilt
In der Tat können wir CG-Stufen über viele Ebenen stapeln, um die Ausgangsimpedanz um einen Faktor von
Dies hebt das niedrigstmögliche
Es gibt Abwägungsprobleme (Trade-offs). Erinnern wir uns an
Der Signalpfad verläuft so:
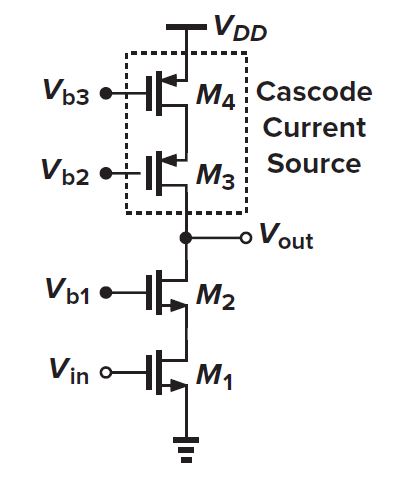
Eine Kaskodestruktur muss nicht zwingend als Verstärker betrieben werden. Eine weitere beliebte Anwendung dieser Topologie ist der Aufbau von Konstantstromquellen. Die hohe Ausgangsimpedanz ergibt eine Stromquelle, die dem Ideal näher kommt, allerdings auf Kosten des Spannungsspielraums (Voltage Headroom).
2.5.2 Gefaltete Kaskode
Die klassische Kaskode hat ein Problem: Es befinden sich zu viele Bauelemente auf einem Pfad von VDD nach GND, was den Hub einschränkt, da wir die Sättigung für alle Bauelemente garantieren müssen, was die Designschwierigkeit erhöht. Um dieses Problem zu lösen, setzen wir die gefaltete Kaskode ein.
In der gefalteten Kaskode sind das CS-Bauelement und das CG-Bauelement auf zwei Pfade aufgeteilt und können getrennt und unabhängig voneinander entworfen werden, allerdings auf Kosten des doppelten Stroms und des vierfachen Stromverbrauchs (da beide Pfade ein
Üblicherweise wird die gefaltete Kaskode mit einer Stromquelle
Für
Die Parallelschaltung verringert die Ausgangsimpedanz und mindert die Verstärkung weiter. Dies ist ebenfalls einer der Kostenfaktoren der gefalteten Kaskode.
Die DC-Charakteristik ist:
3. Differenzverstärker
3.1 Eintakt- und Differenzialbetrieb
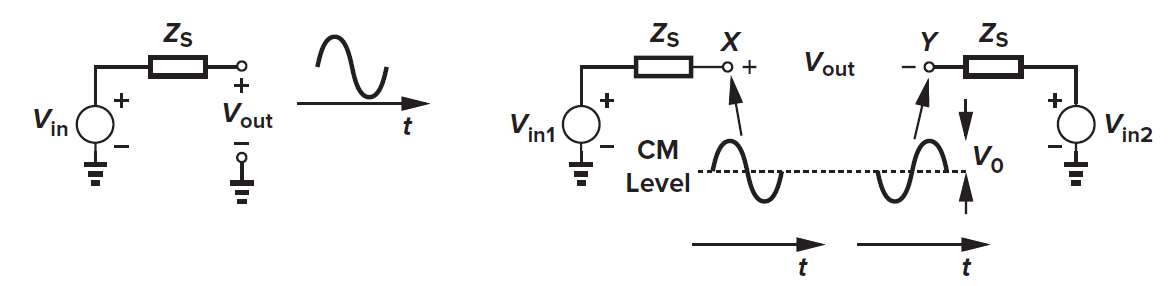
Alle Schaltungen im letzten Kapitel befassen sich mit Eintaktsignalen (single-ended signals), die das Potenzial GND als Referenz verwenden. Ein Differenzsignal ist definiert als ein Signal, das zwischen zwei Knoten gemessen wird, die gleiche und entgegengesetzte Signalausschläge um ein festes Potenzial aufweisen. Dieses Potenzial wird als Gleichtaktsignal (common-mode signal) bezeichnet.
Normalerweise können wir die beiden Eingänge zerlegen:
Auf diese Weise zerlegen wir die Gleichtaktkomponente (common-mode component) und die Gegentaktkomponente (differential mode component).
Warum verwenden wir also Differenzsignale, die komplizierter als Eintaktsignale erscheinen? Betrachten wir den folgenden Fall:
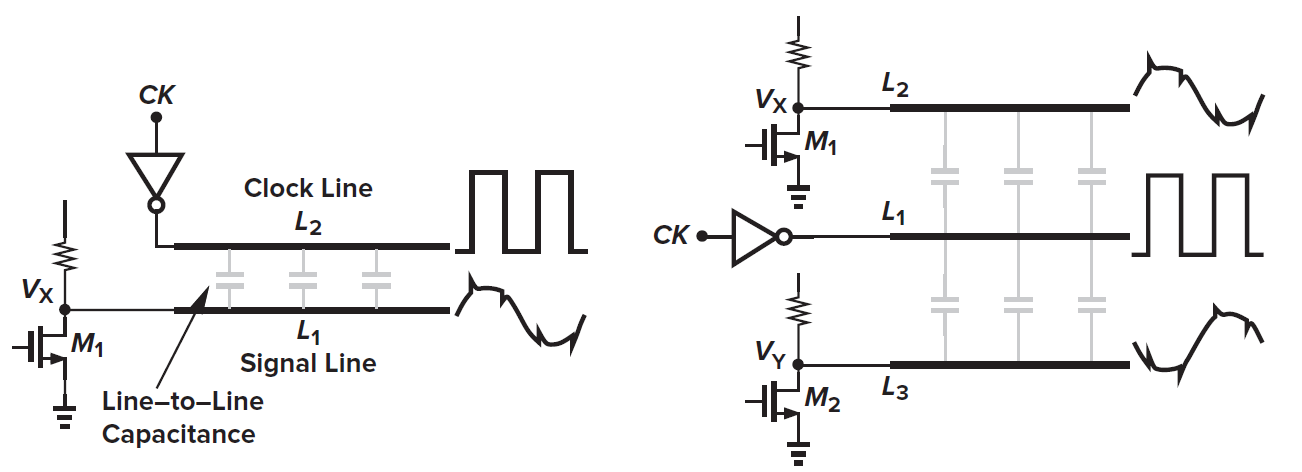
Eine Taktleitung erzeugt durch die parasitäre Kapazität zwischen den Leitungen Umgebungsrauschen auf benachbarten Leitungen. Wenn ein Eintaktsignal auf einem Draht in der Nähe des Taktes liegt, reagiert das Signal empfindlich auf die Taktstörung. Wenn das Signal jedoch als Differenzsignal auf zwei symmetrisch verteilten Leitungen übertragen wird, wirkt die Störung durch den Takt auf beide Leitungen gleich (Amplitude und Phase). Dann löscht sich das gleiche Rauschen im Subtraktionsprozess zur Gewinnung des Gegentaktsignals gegenseitig aus. Das Rauschen wird vollständig auf die Gleichtaktkomponenten geladen, was uns überhaupt nicht interessiert.
3.2 Differenzpaar
3.2.1 Pseudo-Differenzpaar
Wie verstärken wir ein Differenzsignal? Die einfachste Idee ist es, die beiden Zweige getrennt mit der gleichen Verstärkung zu verstärken.
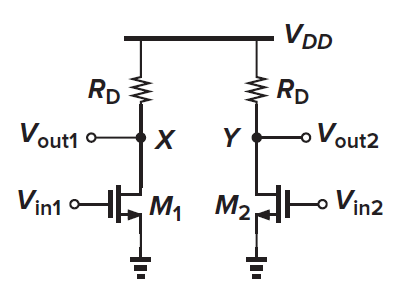
Um differenzielle Eigenschaften zu implementieren, müssen alle Komponenten auf beiden Bauteilen identisch sein. Hier weisen zwei Differenzeingänge,
Da dies nur zwei CS-Stufen mit invertiertem Differenzeingang sind, beträgt die AC-Verstärkung unter Vernachlässigung der Kanallängenmodulation (KLM) und des Substrateffekts:
Da die beiden Pfade fast vollständig unabhängig sind, nennen wir diese Topologie Pseudo-Differenzpaar (pseudo-differential pair).
Alle Probleme der grundlegenden CS-Stufe treten auch bei dieser Topologie auf. Unterschiedliche Gleichtakt-Vorspannungen beeinflussen
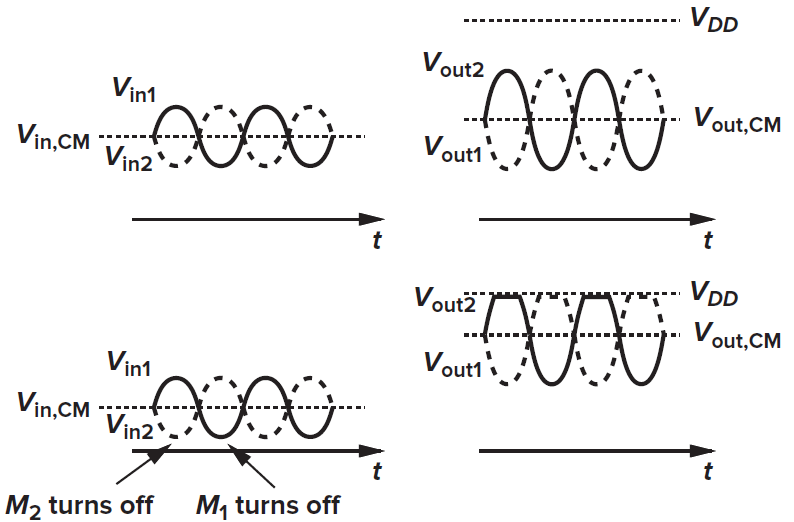
Andererseits verstärkt das Pseudo-Differenzpaar auch die nutzlosen Gleichtaktsignale, was den Ausgangsaussteuerbereich beeinflusst.
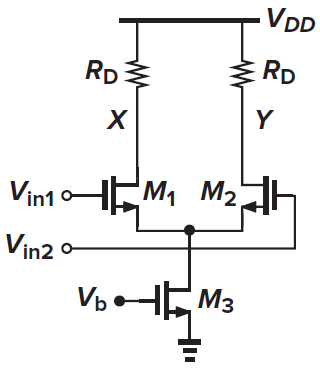
3.2.2 Grundlegendes Differenzpaar
Eine einfache Modifikation kann das obige Problem lösen. In dieser Topologie sind die beiden Pfade mit einer Konstantstromquelle gekoppelt, die normalerweise durch ein MOS-Bauelement implementiert wird. Diese Topologie wird als quellengekoppeltes Paar (source-coupled pair) bezeichnet.
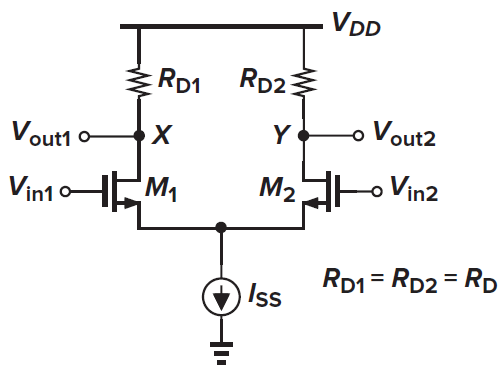
Die Quelle führt eine Einschränkung zwischen den beiden Pfaden ein:
Wir scannen
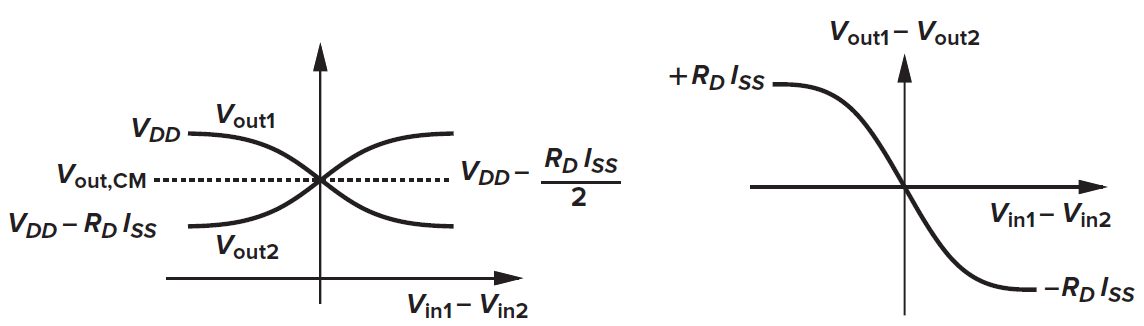
Beachten Sie, dass die Schaltung drei Differenzgrößen enthält:
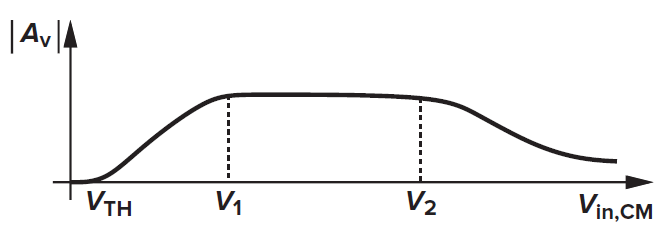
Betrachten wir nun das Gleichtaktverhalten. Wir setzen
Wenn
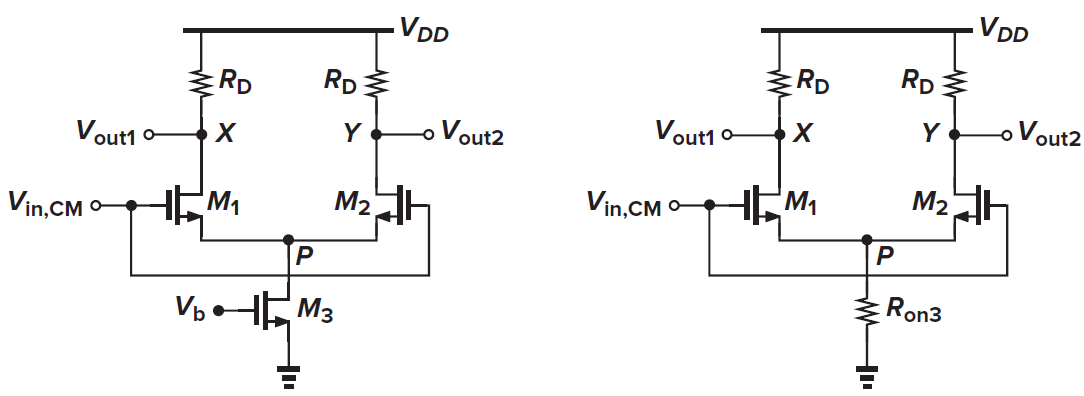
Wenn
Zusammenfassend:
Mit weiter steigendem
In diesem Bereich nähert sich
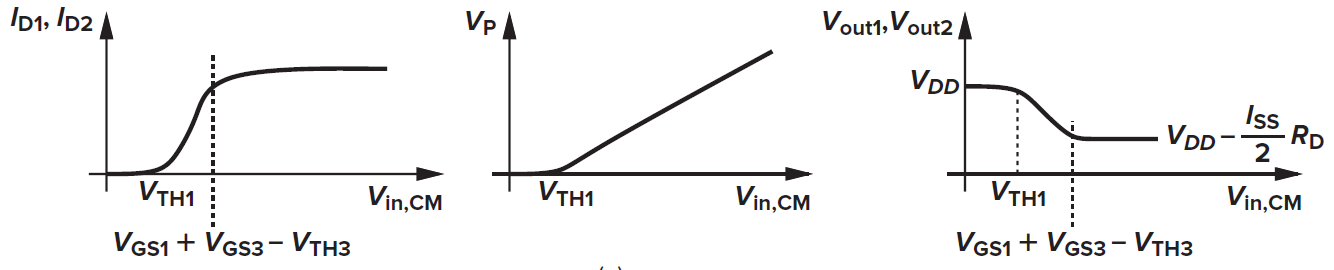
Jenseits der Obergrenze ändern sich die Gleichtakteigenschaften nicht, aber die Differenzverstärkung sinkt.
Es folgt der Ausgangsaussteuerbereich. Wenn M1 und M2 in Sättigung sein sollen:
Dies ergibt:
Die Obergrenze ist natürlich
Beachten Sie, dass ein kleineres
Nun analysieren wir das Gegentaktverhalten quantitativ. Wir berechnen einfach
Für ein Bauelement nach dem Quadratgesetz haben wir:
und daher:
Aus den vorangegangenen Definitionen folgt:
Wir möchten den Differenzausgangsstrom
Das heißt:
Durch erneutes Quadrieren der beiden Seiten und unter Beachtung von
Somit:
Nun erhalten wir die Beziehung zwischen dem Differenzstrom und der Differenzeingangsspannung. Wir können sagen, dass M1, M2 und die Tail-Stromquelle als spannungsabhängige Stromquelle arbeiten, die
Bevor wir weiter untersuchen, ist es aufschlussreich, die Steigung der Kennlinie zu berechnen, d. h. die äquivalente
Für
Da jeder Transistor in diesem Zustand einen Ruhestrom von
Lassen Sie uns den Ausdruck nun genauer untersuchen. Wenn
was dieselbe Gleichgewichts-
Aber was passiert bei größeren Werten von
Dieser Wert bedeutet: Wenn Sie
Der Wert von
Somit ist
Im Gleichgewicht gilt
Es folgt die Kleinsignalanalyse. Wir nehmen an, M3 sei eine Konstantstromquelle und trennen sie im AC-Diagramm ab. Bezeichnen wir den von den beiden Bauelementen gemeinsam genutzten Source-Anschluss mit S und den Einfluss der beiden Pfade auf
Beachten Sie, dass die beiden Pfade vollständig symmetrisch sind und die Eingänge invertiert sind. Also gilt
Dies ist ein erstaunliches Lemma im Differenzpaar. Die Spannung am Knoten S folgt dem Gleichtakteingang, bleibt aber in der AC-Analyse konstant. Wir nennen S eine „virtuelle Masse“ (virtual ground), da sie faktisch als AC-Masse dient. Das liegt daran, dass der invertierte Eingang in den beiden Pfaden in invertierte
Da die beiden Pfade vollständig symmetrisch sind:
dann:
Aber PVT kann den Wert von
An Knoten S beträgt der AC-Strom:
was zu folgendem führt (der Summenterm verschwindet aufgrund der invertierten Phase):
was ergibt:
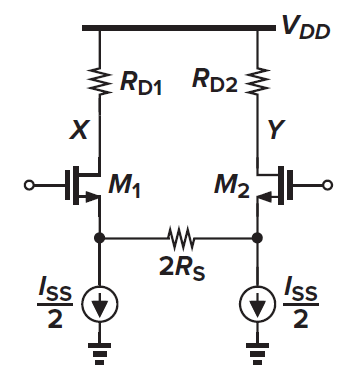
3.2.3 Degeneriertes Differenzpaar
Wie die einstufige CS-Schaltung können auch Differenzpaare eine resistive Gegenkopplung (Degeneration) enthalten, um ihre Linearität zu verbessern.
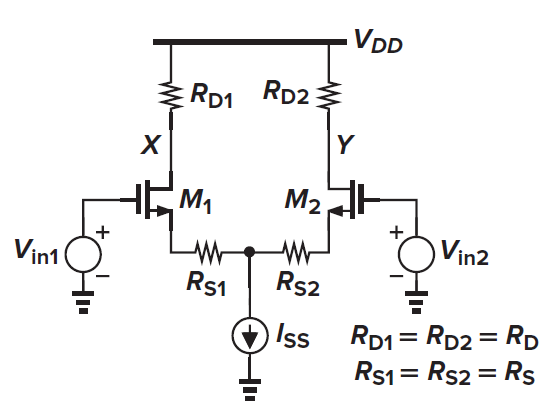
Das Prinzip ist dasselbe wie in der CS-Stufe. Zur Analyse führen wir die Halbschaltungstechnik (half-circuit technique) ein. Diese Technik ist effizient, da die beiden Pfade in einem Differenzpaar vollständig symmetrisch sind. Wir analysieren Gleichtakt und Gegentakt getrennt.
Zuerst der Gleichtakt (common-mode). Angenommen, M1 und M2 befinden sich beide in Sättigung; wenn die Gegentaktspannung (DM) gleich 0 ist, führt jeder Pfad einen Strom von
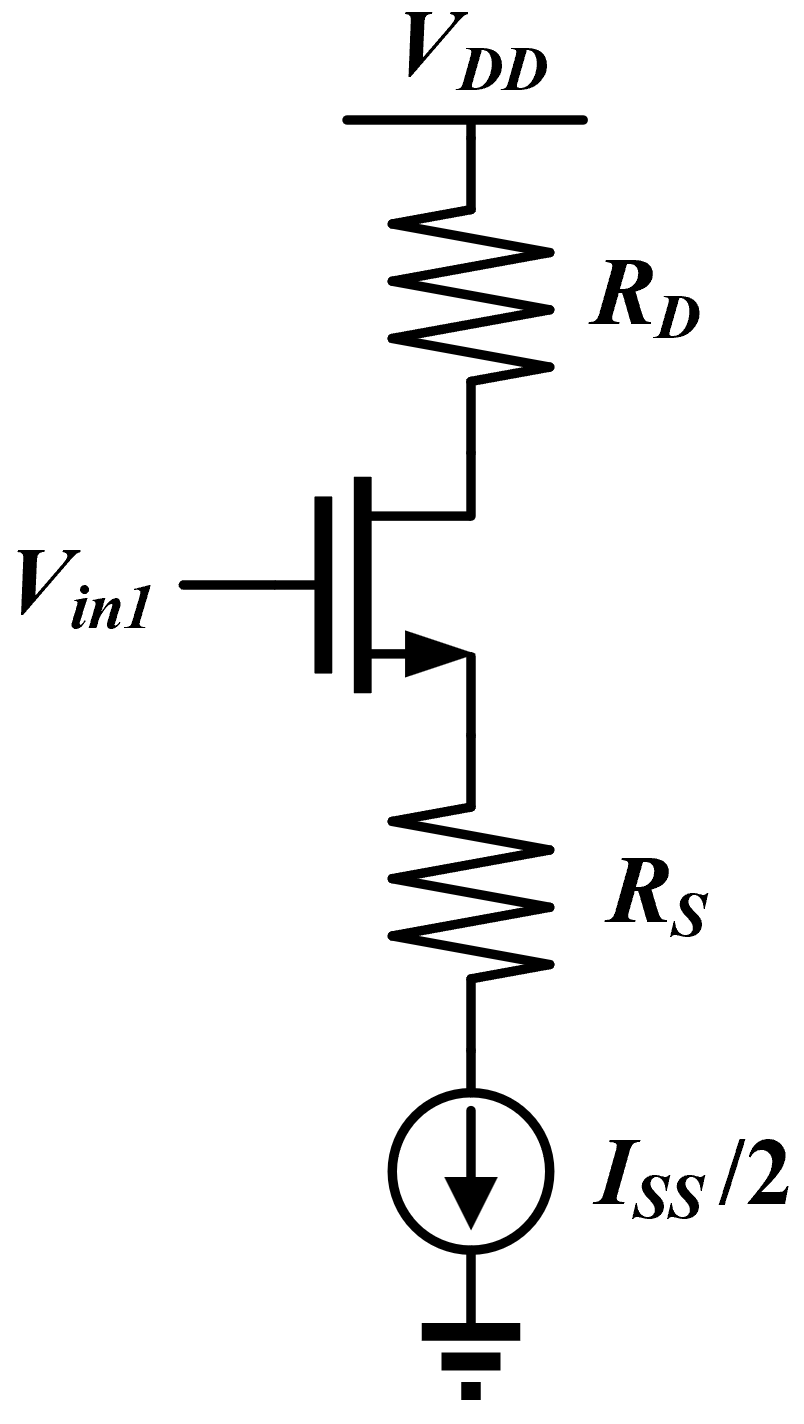
Beachten Sie, dass die Gegenkopplung den Aussteuerbereich (headroom) um
In der Gegentakt-Analyse (DM) sehen Sie, dass der Widerstand
Dann der Gegentakt (differential mode). Ähnlich wie bei der Analyse im letzten Abschnitt ist der Knoten zwischen den Source-Widerständen die virtuelle Masse. In der Gegentakt-Analyse verschwindet daher die Stromquelle, und die Gegentakt-Halbschaltung ist eine typische CS-Stufe mit Source-Gegenkopplung.
Die Kleinsignalverstärkung sollte dann wie folgt lauten:
Somit tauscht die Schaltung Verstärkung gegen Linearität ein. Die Verbesserung der Linearität ist unten dargestellt.
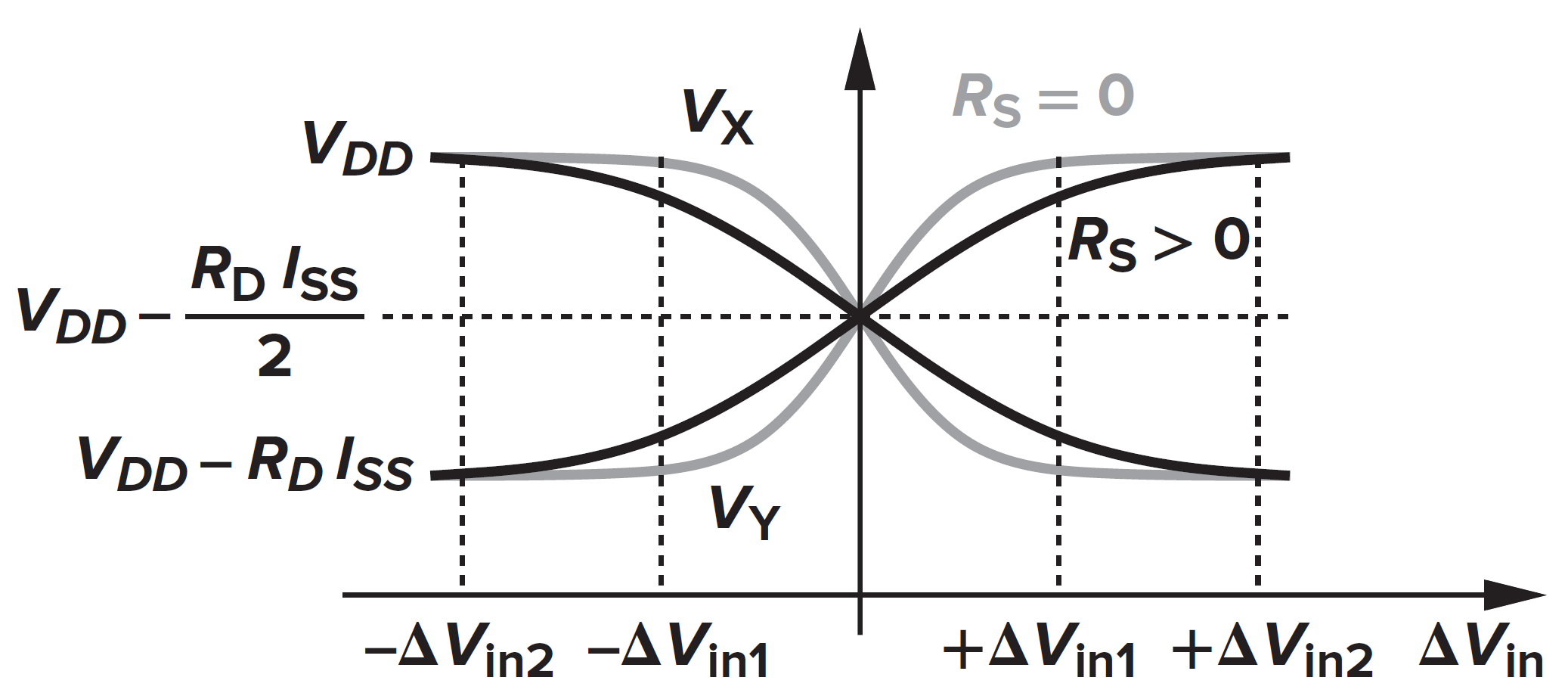
Die Gegenkopplung verbreitert den Eingangsaussteuerbereich. Angenommen, der Gleichtakt-Eingang ist auf einem geeigneten Pegel vorgespannt. Dann erhöhen Sie den Gegentakt-Eingang, bis ein Bauelement ausschaltet. In diesem Fall übernimmt der andere Pfad den gesamten Strom
ergibt:
Beachten Sie, dass der erste Term auf der rechten Seite der Eingangsaussteuerbereich vor der Gegenkopplung ist. Die Schlussfolgerung ist also, dass die Gegenkopplung den Eingangsaussteuerbereich um
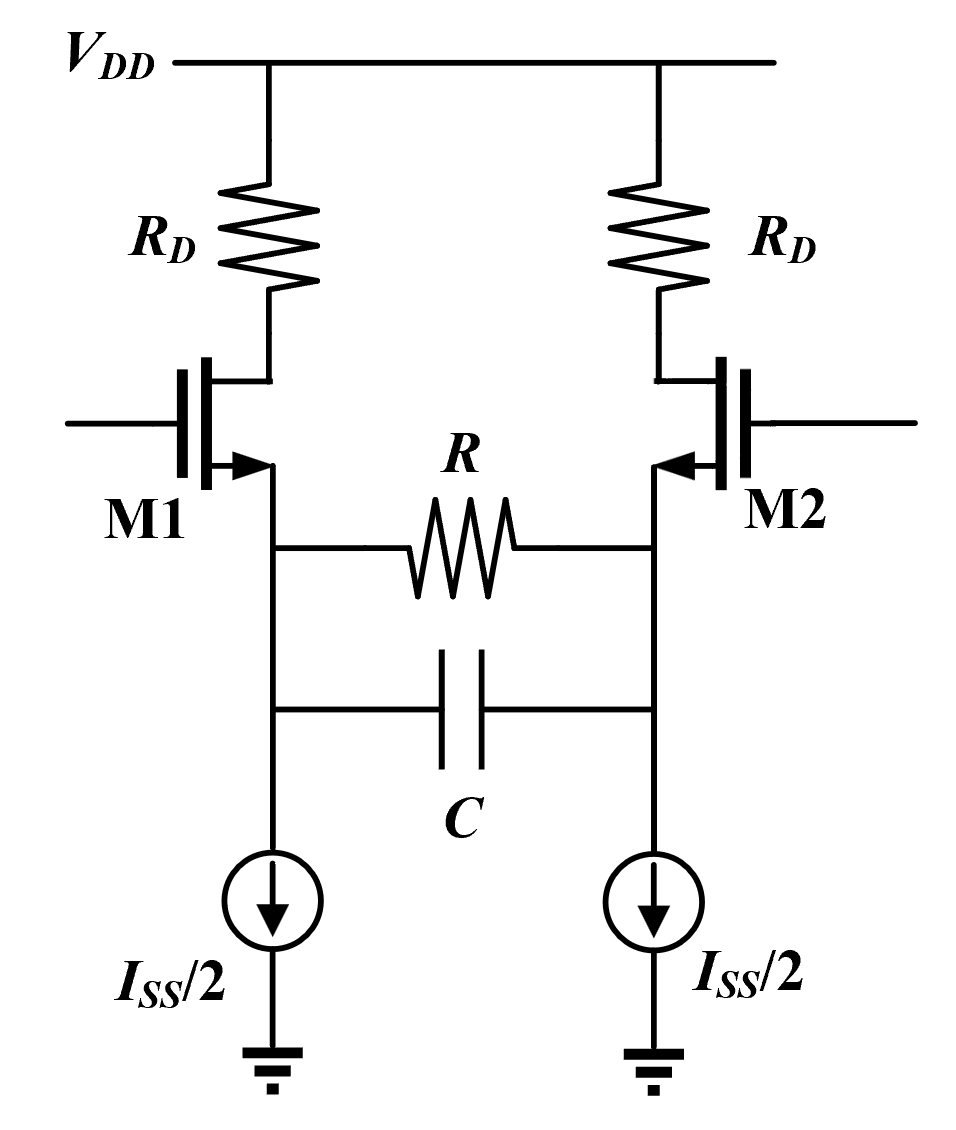
Wir müssen die Halbschaltungstechnik klären. Das Wesen dieser Technik ist die Symmetrie. Wenn also Verbindungen zwischen den beiden symmetrischen Pfaden bestehen, sollte die Verbindung in zwei Teile geteilt werden. Nehmen wir zum Beispiel die untenstehende Schaltung.
Für den Gleichtakt sind die Spannungen zwischen
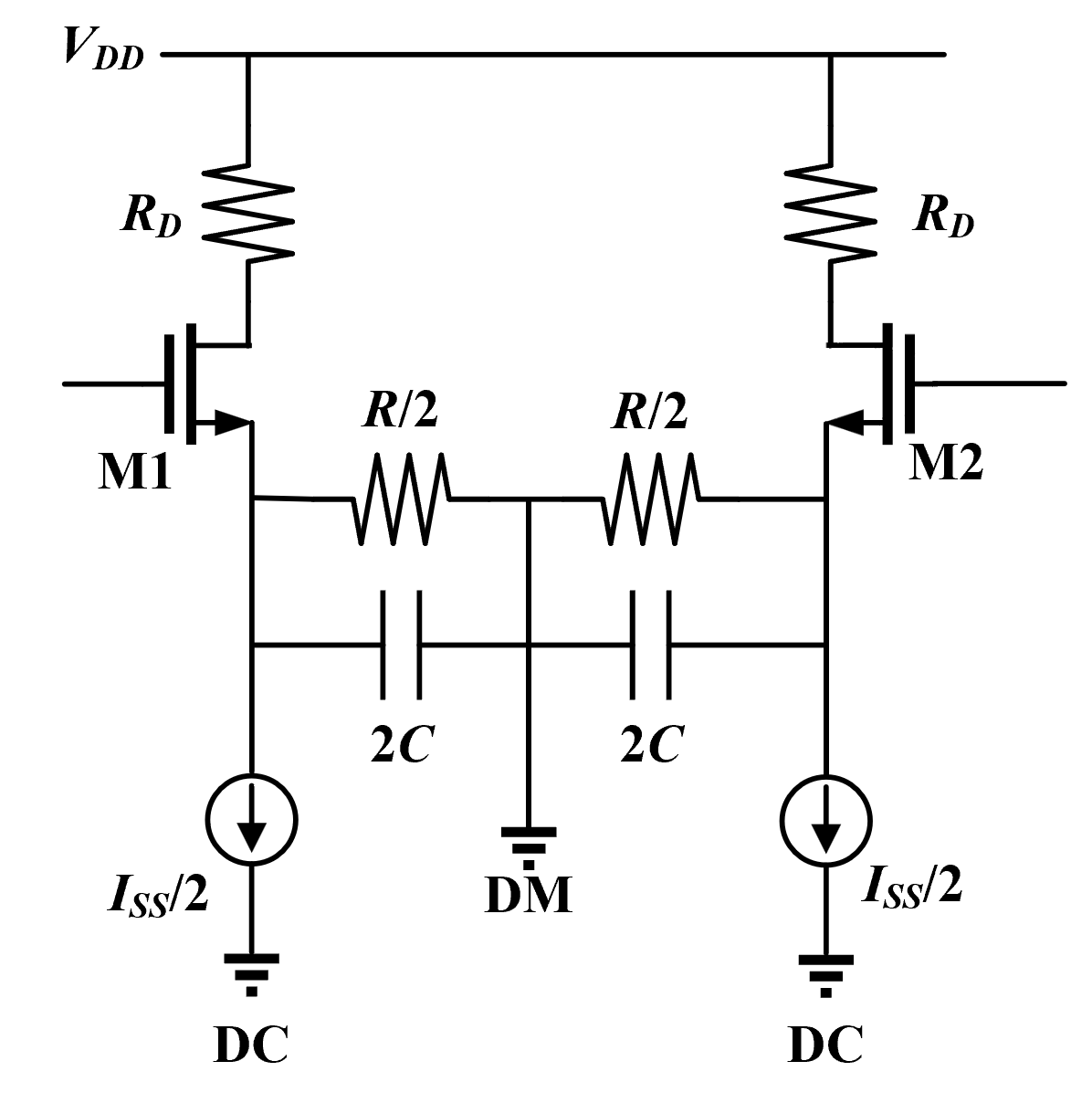
Offensichtlich sollte die Halbschaltung wie folgt aussehen:
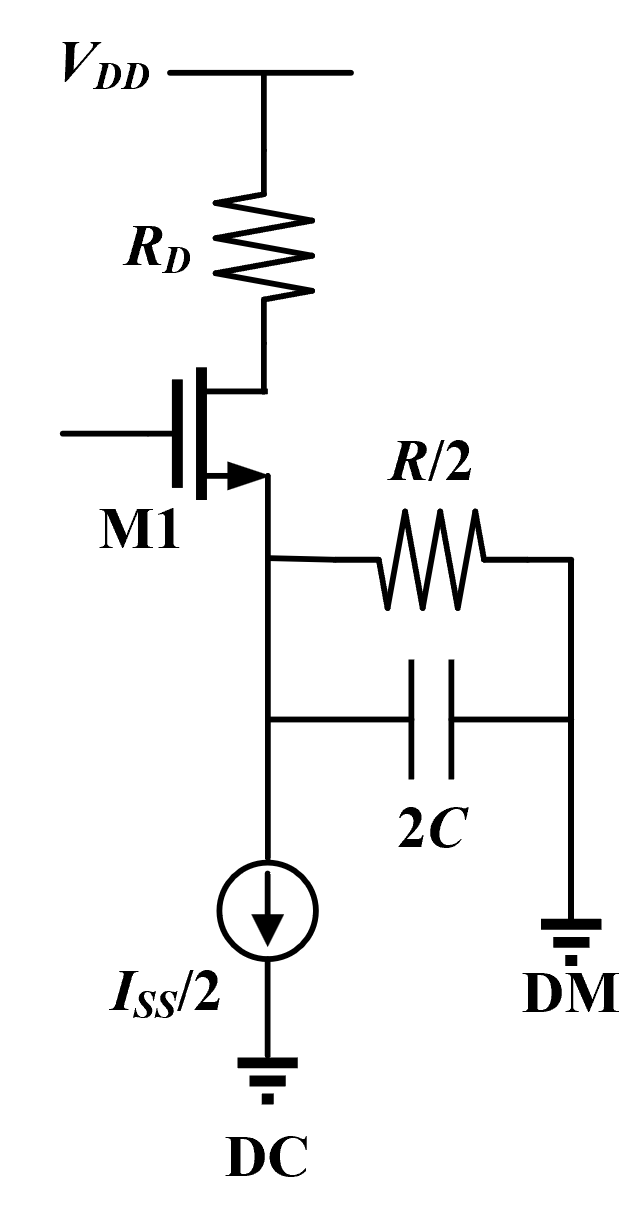
Hinweis: Die virtuelle Masse (Gegentakt-Masse) ist nicht die Kleinsignal-Masse (AC-Masse). Erstere basiert auf der Symmetrie in Differenzpaaren, deren Äquivalent immer noch die DC-Masse ist, da das Gegentaktsignal weiterhin ein Großsignal ist. Letztere basiert jedoch auf der Linearität. Daher sollte die Gegentakt-Masse in der Analyse als DC-Masse betrachtet werden.
3.3 Gleichtaktverhalten
In der Realität ist die Schaltung nicht ideal. Im Allgemeinen führen bei einem Differenzpaar entweder die Asymmetrie oder die endliche Impedanz der Tail-Stromquelle zu Gleichtaktkomponenten im Ausgangs-Gegentaktsignal.
Betrachten wir zunächst die Impedanz der Tail-Stromquelle.
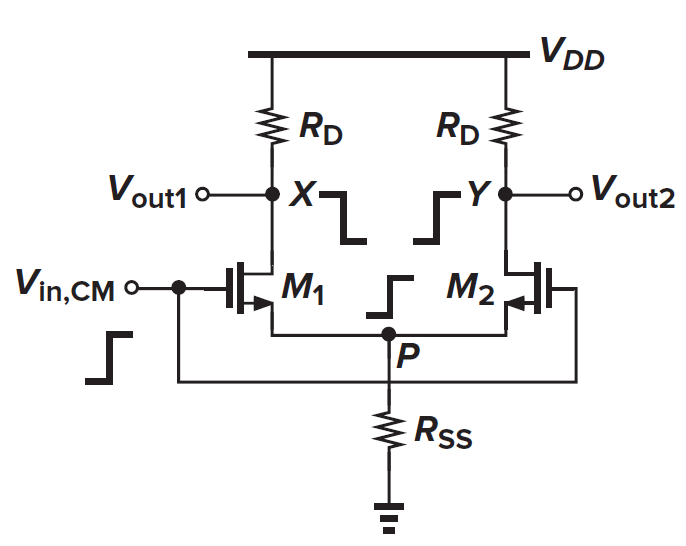
Wir nehmen zunächst an, dass die Schaltung symmetrisch ist. In jedem Pfad gilt:
Durch Anwendung der Halbschaltungstechnik:
Und nach der Knotenregel (KCL):
Kombiniert man die beiden Gleichungen:
Dann führt die Variation von
In einer symmetrischen Schaltung stören Variationen des Eingangs-Gleichtakts (CM) die Arbeitspunkte, was die Kleinsignalverstärkung verändert und möglicherweise die Ausgangsspannungsaussteuerbereiche begrenzt.
Nun zur Asymmetrie. Angenommen, die
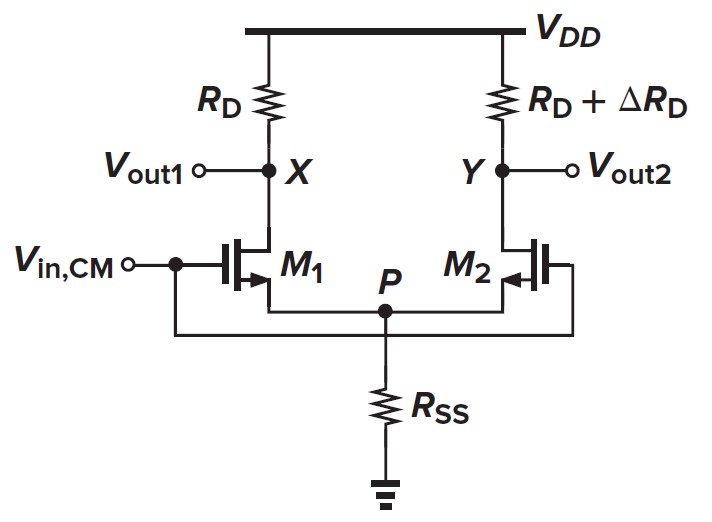
Mit der obigen Schlussfolgerung ergeben sich die Spannungen an den beiden Ausgangsknoten zu:
Somit führt eine Gleichtaktänderung am Eingang zu einer Gegentaktkomponente am Ausgang. Andererseits sind MOS-Bauelemente in der Regel nicht symmetrisch. Aufgrund von Dimensions- und Schwellenspannungs-Fehlanpassungen führen die beiden Transistoren leicht unterschiedliche Ströme und weisen ungleiche Steilheiten (Transkonduktanzen) auf. Schreibt man
und
Wir erhalten dann die Ausgangsspannungen als:
Die Differenz ist:
Mit anderen Worten, die Schaltung wandelt Eingangs-Gleichtaktschwankungen in einen Gegentaktfehler um, und zwar um einen Faktor gleich:
Um die Unterdrückungsleistung einer Differenzschaltung zu messen, definieren wir im Allgemeinen einen Parameter namens Gleichtaktunterdrückungsverhältnis (common-mode rejection ratio, CMRR).
Wird nur die Fehlanpassung von
3.4 Differenzpaar mit MOS-Lasten
Die Last eines Differenzpaars muss nicht durch lineare Widerstände realisiert werden. Wie bei den Common-Source-Stufen können Differenzpaare diodengekoppelte Lasten oder Stromquellenlasten verwenden.
Die Halbschaltung zeigt, dass es sich um eine CS-Stufe mit MOS-Last handelt. Erinnern wir uns an das letzte Kapitel mit dem Kleinsignalmodell:
Dies ergibt:
Ersetzt man
$$
A_v = -\sqrt{\dfrac{\mu_n(W/L)N}{\mu_P(W/L)P}} = \dfrac{|V{GS2} - V{THP}|}{V_{GS1} - V_{THN}}
$$
Diodengekoppelte Lasten verbrauchen Spannungsspielraum (headroom) und schaffen so einen Kompromiss zwischen der Verstärkung und dem Ausgangsaussteuerbereich, da das Ansteigen von
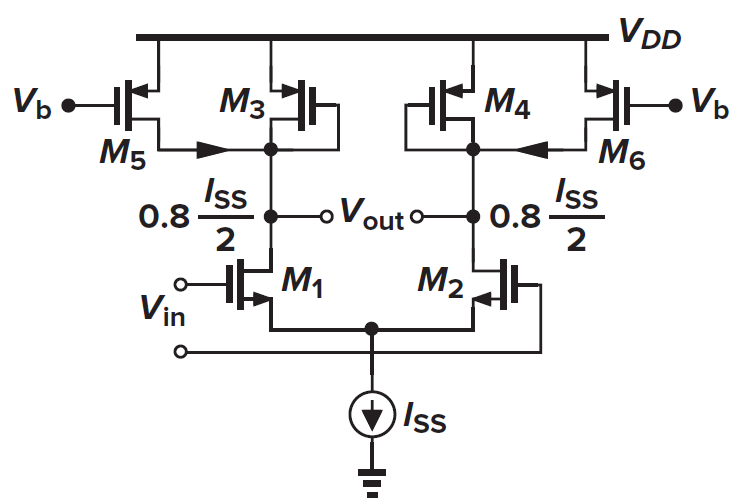
In dieser Struktur zweigt M5 80% von
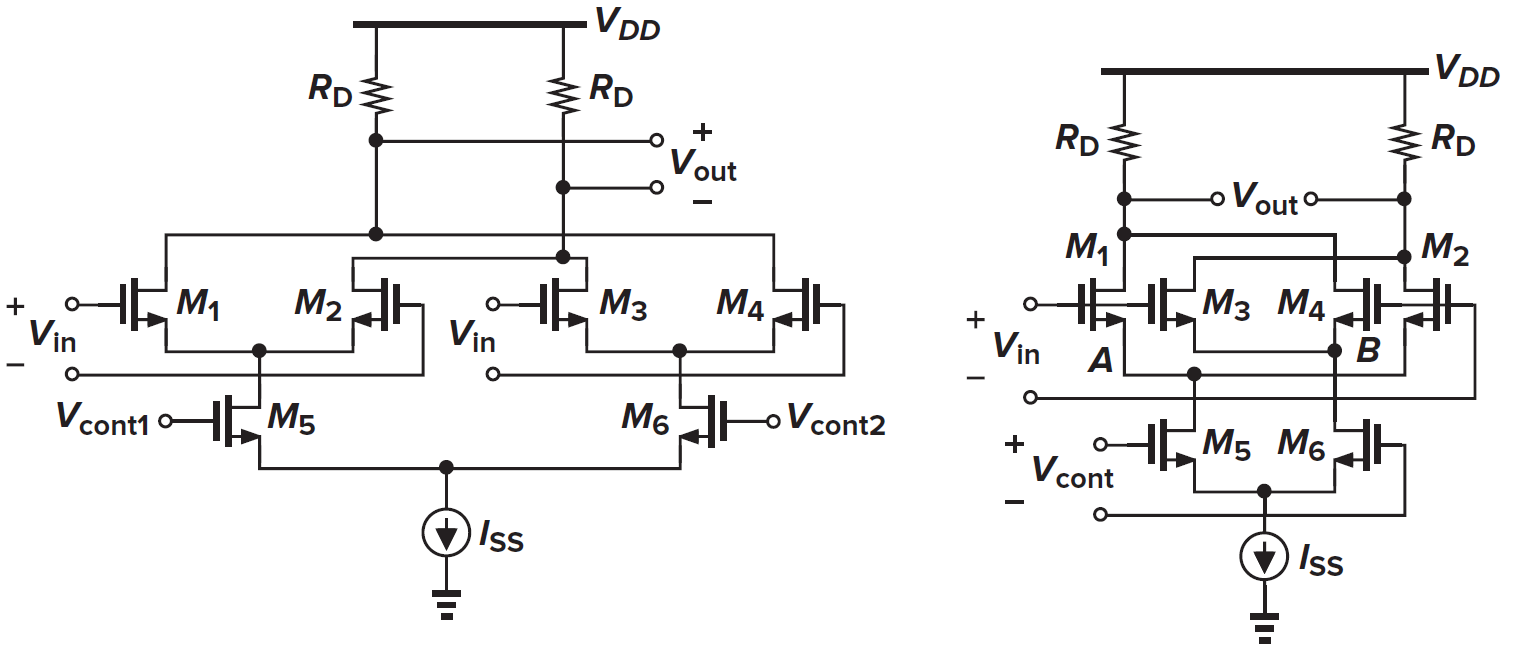
3.5 Gilbert-Zelle
Die Kleinsignalverstärkung eines Differenzpaars ist eine Funktion von
Beachten Sie: Wenn wir die Definition der Ausgangsklemmen umkehren, wird die Verstärkung positiv:
Um nun eine Verstärkung zu erhalten, die kontinuierlich von negativ nach positiv variiert, sollten zwei Paare implementiert werden.
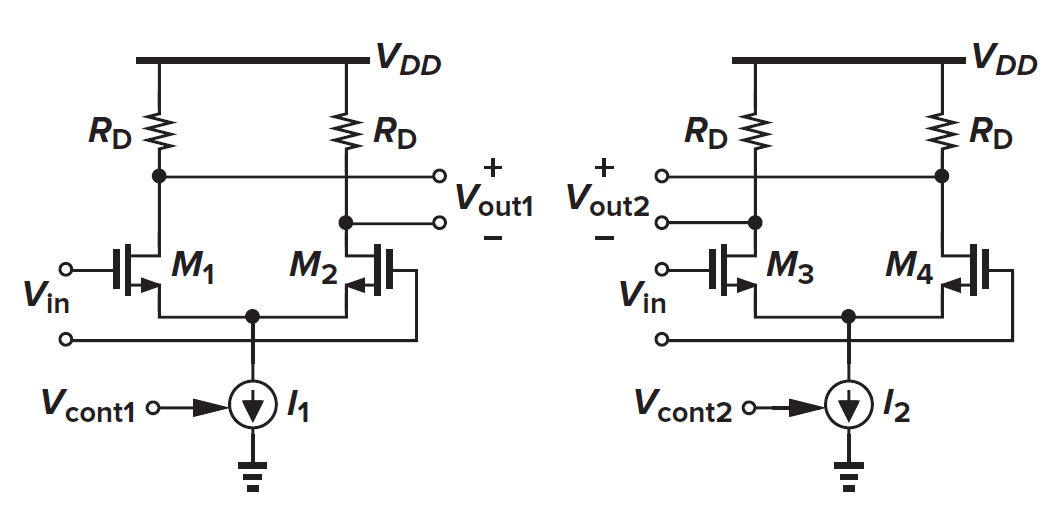
Wenn wir die beiden Ausgangssignale addieren:
Falls die beiden Paare völlig identisch sind:
Indem man
Aber wie addiert man die Differenzpaare zusammen? Beachten Sie, dass:
Dann verbinden wir die entsprechenden Anschlüsse miteinander (da
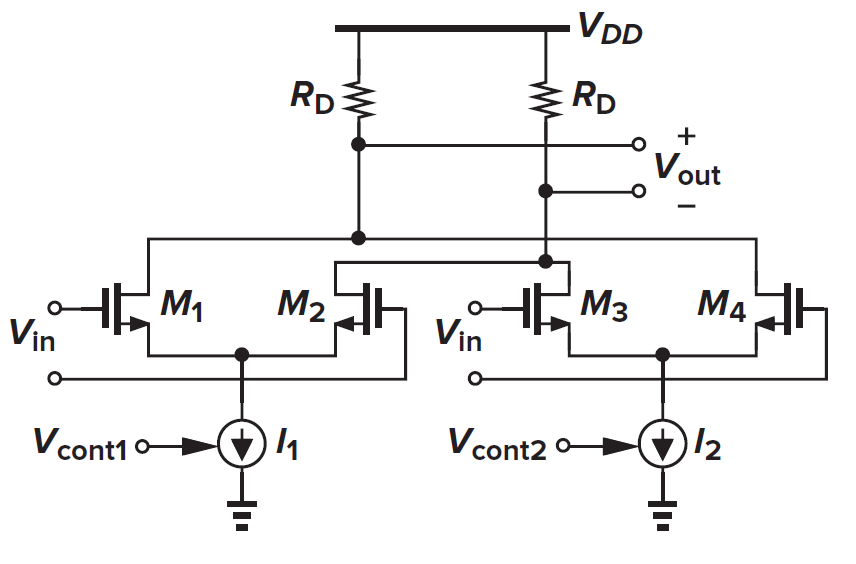
Nun enthält der Arbeitspunkt zwei unabhängige Variablen,
4. Biasing-Techniken
4.1 Stromspiegel
In den vorangegangenen Kapiteln haben wir mehrfach Vorspannungen oder -ströme verwendet, zum Beispiel den Tail-Strom in einem Differenzpaar. Um einen Strom zu erzeugen, gibt es zwei Ansätze:
- Erzeugung einer Vorspannung am Gate eines MOS-Bauelements, das als Stromquelle fungiert.
- Kopieren eines Referenzstroms.
Der erste Ansatz ist nicht praktikabel. Um zu verstehen, warum, betrachten wir die folgende Schaltung:
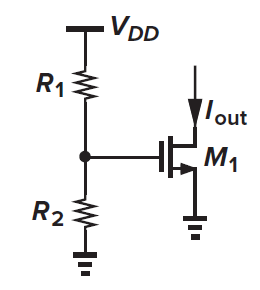
In dieser Schaltung gilt:
Dies scheint einfach, ist aber absolut ungeeignet. Erstens variiert der Strom mit
Ein weiterer Punkt ist, dass die Erzeugung von Spannungspegeln durch Spannungsteiler ebenfalls eine schlechte Option ist, da sich die Spannung mit der Last ändert.
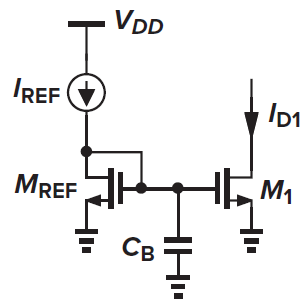
Daher sollten wir den zweiten Ansatz anwenden: das Kopieren eines Referenzstroms. Diese Funktion wird durch den Stromspiegel (current mirror) realisiert. Die Grundidee ist, dass für ein MOS-Bauelement
Daraus ergibt sich die folgende Topologie: der Stromspiegel.
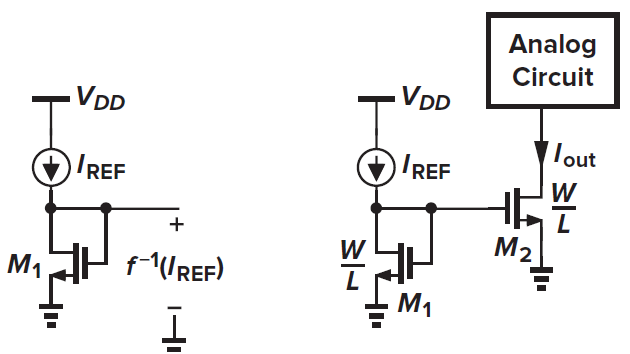
M1 ist diodengekoppelt, sodass sichergestellt ist, dass er in Sättigung arbeitet; dann folgt
Man erhält:
Sind die beiden Bauelemente identisch, gilt
In der Regel werden für alle Bauelemente in Stromspiegeln die gleichen Längen verwendet, um Fehler durch Seitendiffusion zu minimieren. Eine Verbreiterung des Kanals würde zudem zusätzliche Fertigungsfehler einführen (identische Bauelemente weisen weniger Fehler auf). Daher werden in der Praxis identische Bauelemente parallel gestapelt, um den Effekt einer direkten Kanalverbreiterung zu erreichen.
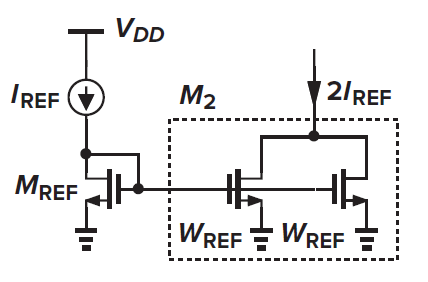
Wenn es um Brüche geht (wie
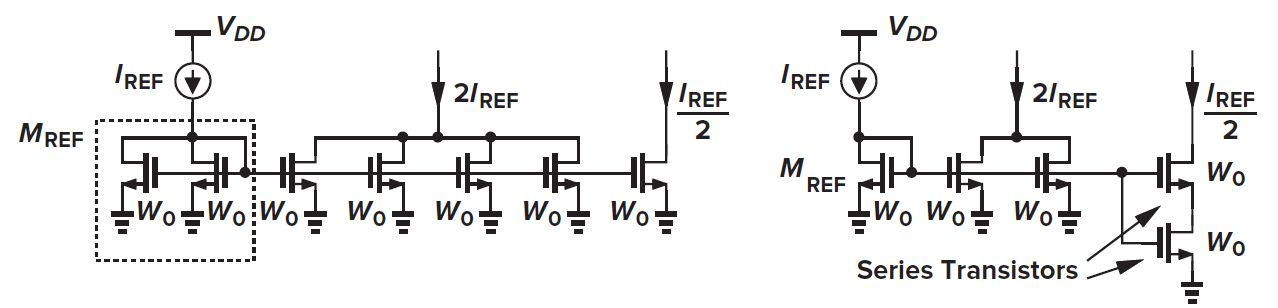
Aber auch die CLM beeinflusst den Ausgangsstrom. Vernachlässigt man die CLM, bleibt der Term
Um Änderungen in
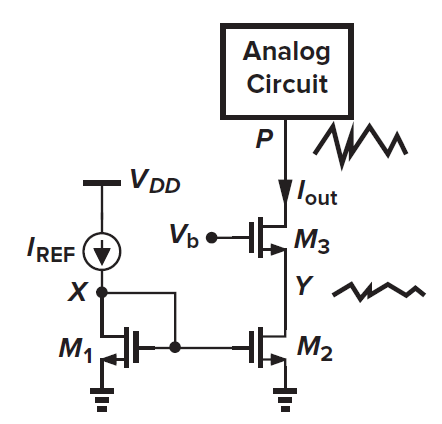
Die Vorspannung kann durch
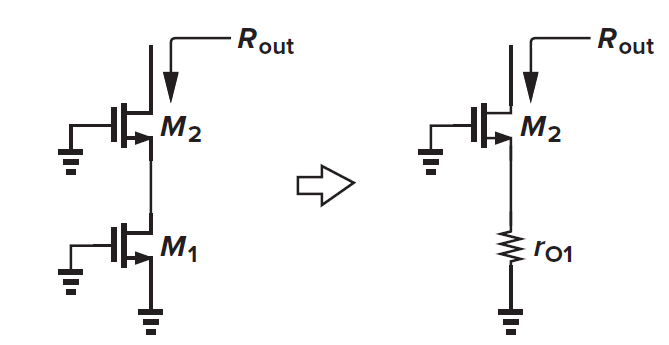
Für M1 gilt
Cascode-Schaltungen verbrauchen jedoch Ausgangs-Spannungsspielraum (headroom). Damit alle Bauelemente gesättigt bleiben, beträgt die minimal zulässige Spannung am Knoten P:
Wenn
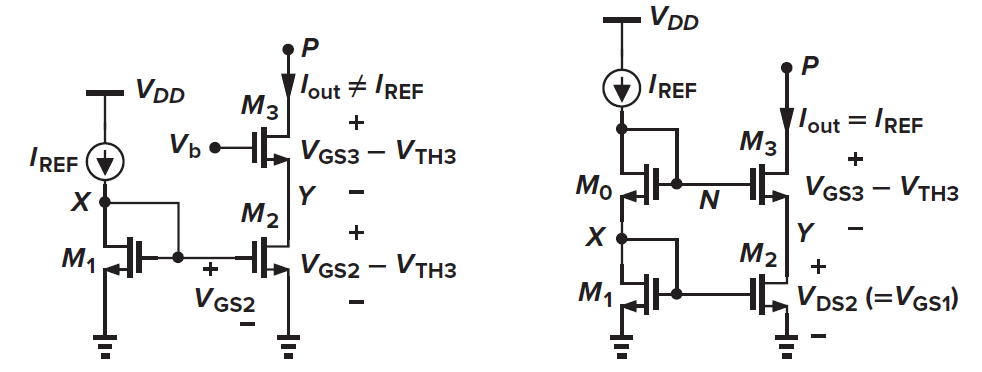
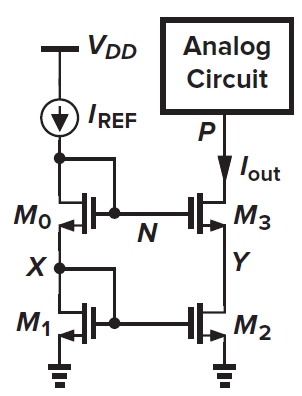
Offensichtlich verschwendet der Cascode den Spielraum einer Schwellenspannung (
Dabei gilt
Mit diesem Größenverhältnis gilt
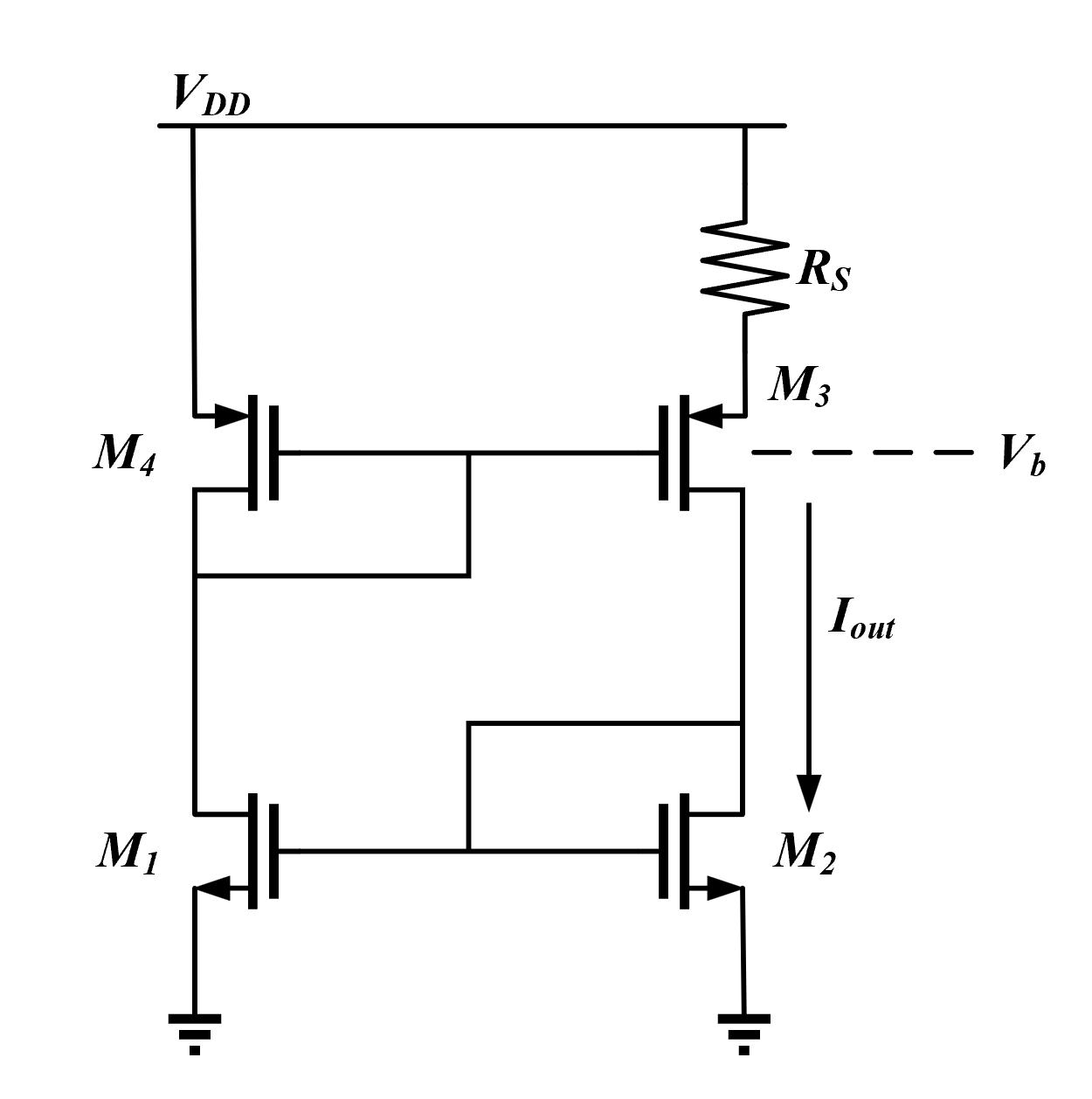
4.2 Stromerzeugung
Aber woher kommt der Referenzstrom? Dazu benötigen wir eine Stromerzeugungsschaltung.
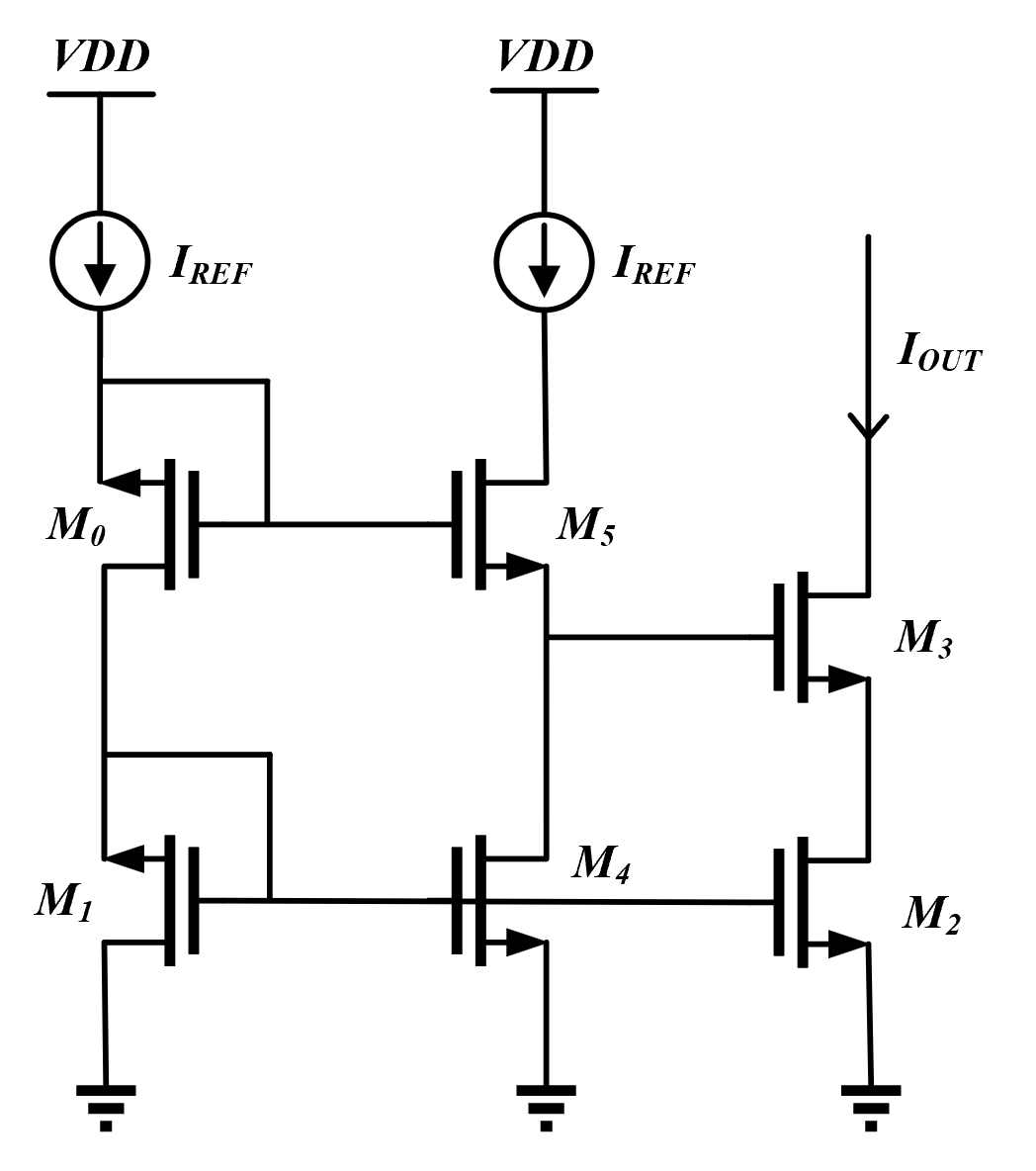
Die folgende Schaltung wird als Konstante-Steilheits-Aktuellqulle bezeichnet.
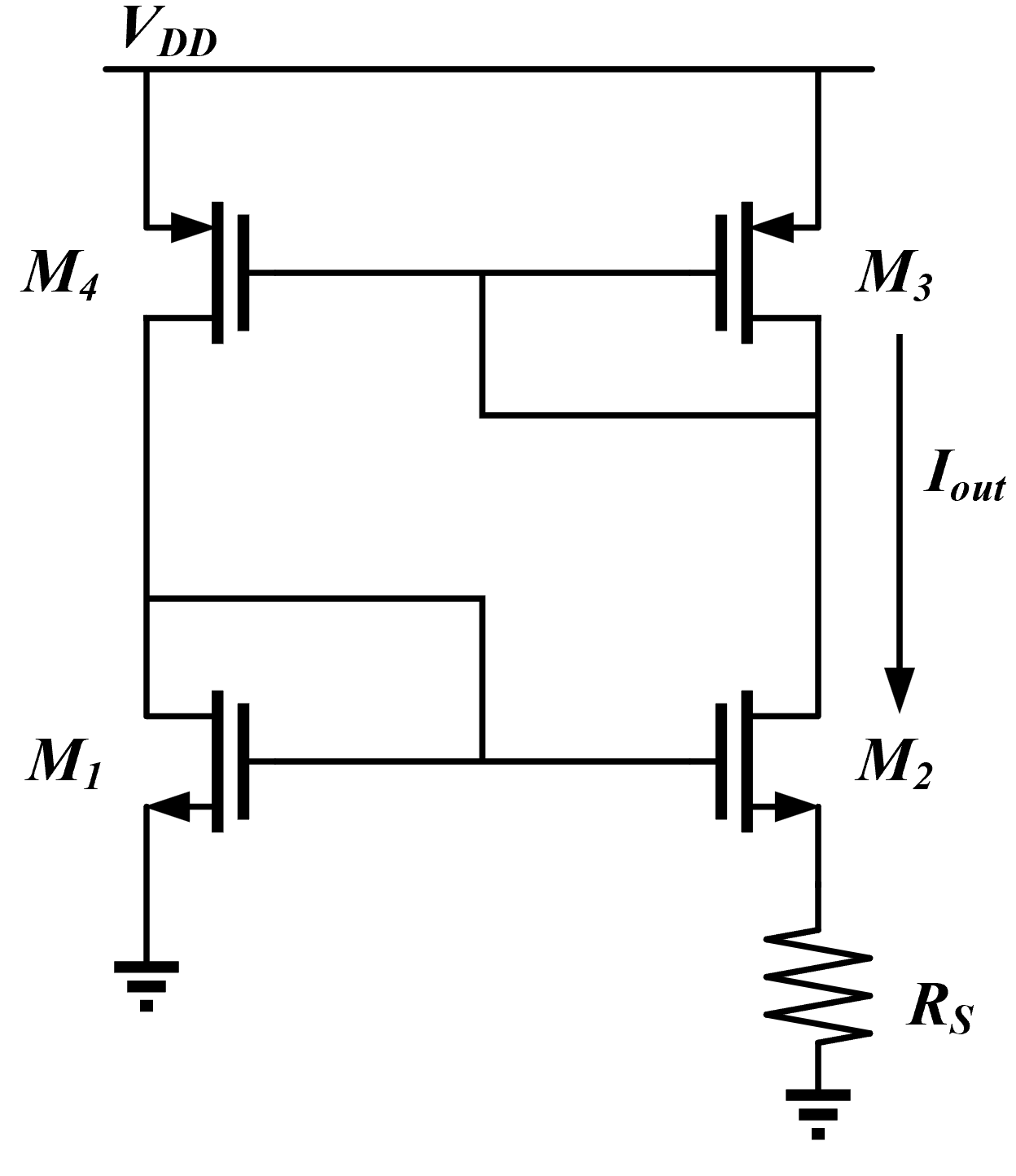
Dabei gilt
Unter dieser Bedingung wird der Strom durch M4 (der als
Im REF-Pfad:
Während im OUT-Pfad:
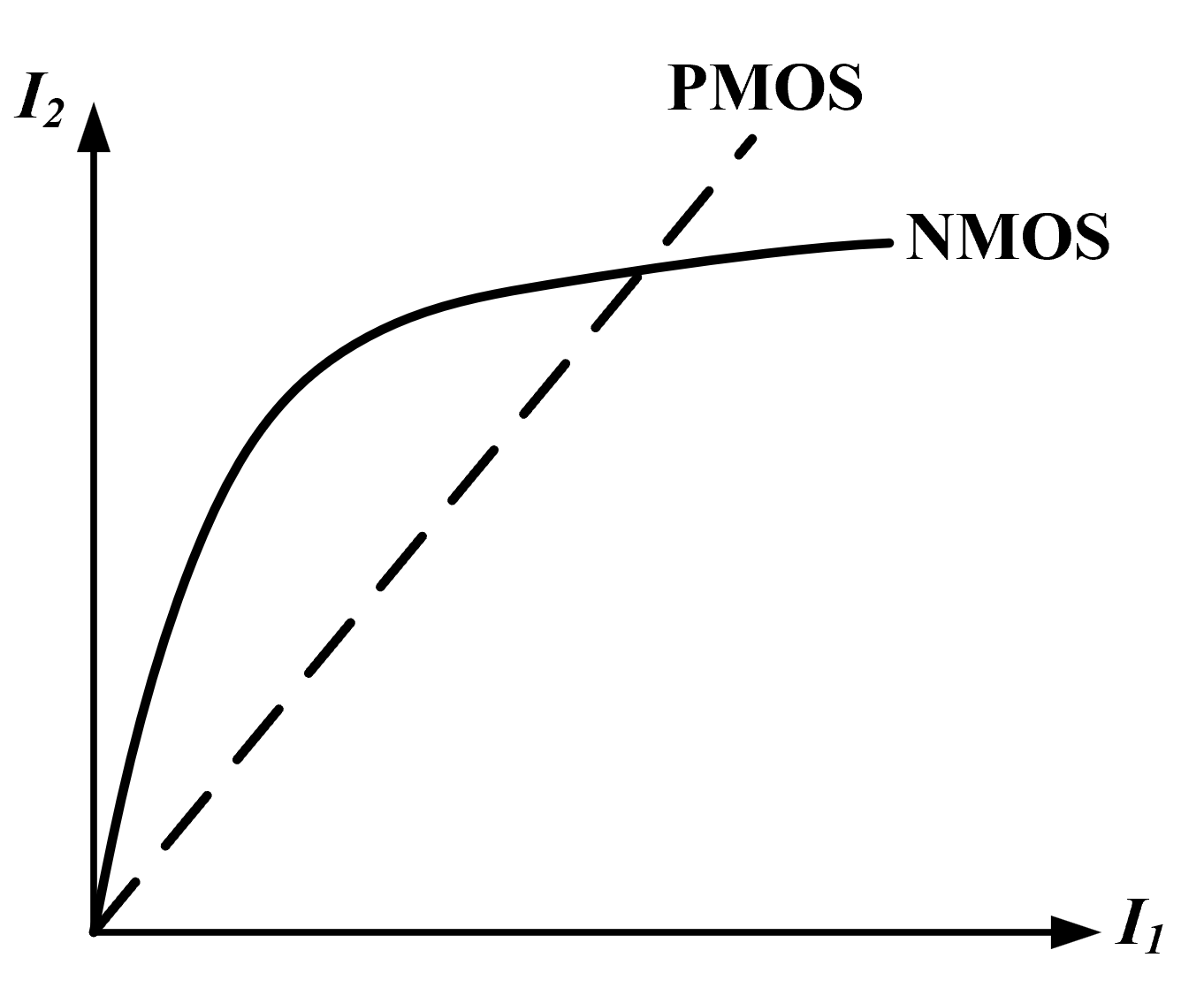
Zudem gilt:
Der PMOS-Spiegel erzwingt
oder
wobei
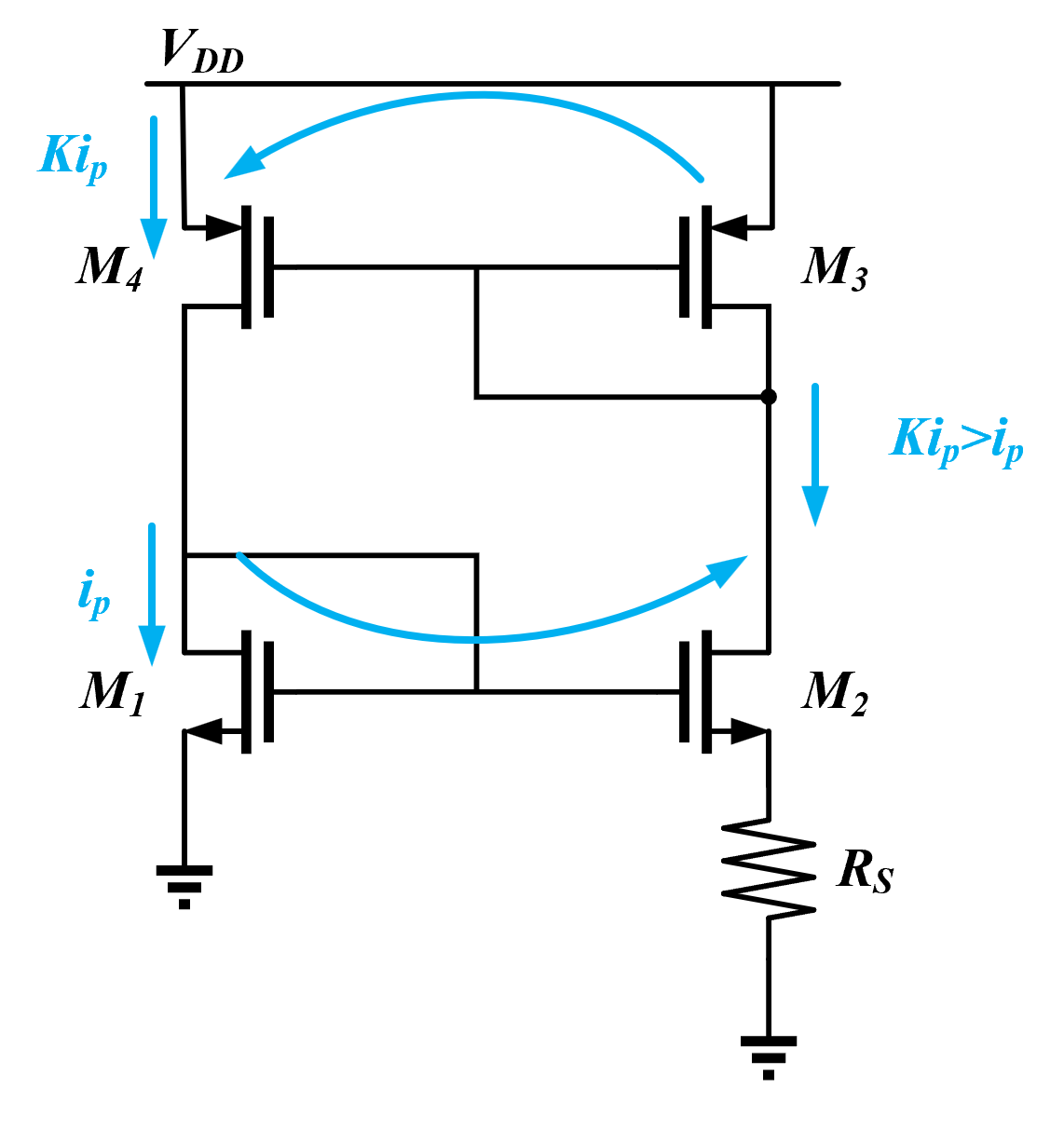
Eine Lösung von 0 bedeutet, dass die Schaltung völlig stromlos bleiben kann. Eine Schaltung mit zwei unterschiedlichen Lösungen wird typischerweise als eine mit einer degenerierten Lösung bezeichnet. Tatsächlich ist die triviale Lösung (Null) instabil. Bei der geringsten Störung steigt der Strom sofort an, erreicht schließlich die nicht-triviale Lösung und pendelt sich im Gleichgewicht ein.
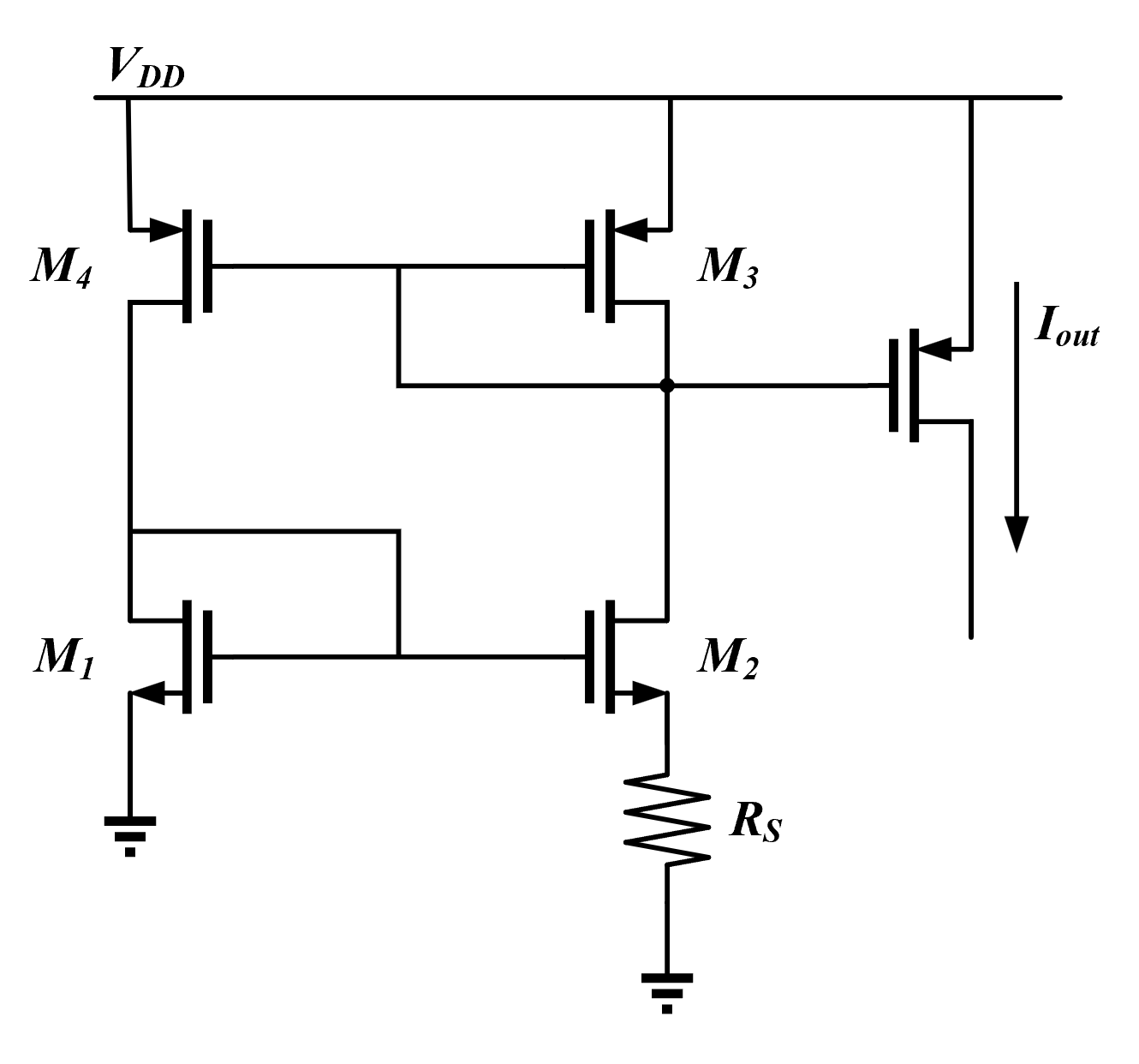
In der folgenden Abbildung sei
Um den Substrateffekt (body effect) zu vermeiden, kann die Last zwischen PMOS und VDD platziert werden.
Um den Strom auszugeben, wird er erneut gespiegelt:
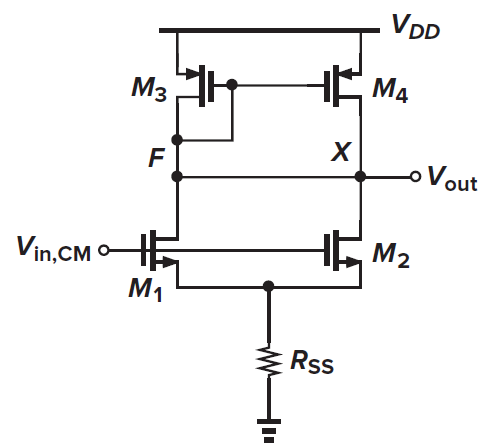
4.3 Operationaler Transkonduktanzverstärker (OTA)
Im Allgemeinen benötigen wir unsymmetrische Signale (single-ended). In diesem Fall ist ein klassischer Differenzverstärker nicht anwendbar. Daher benötigen wir einen operationalen Transkonduktanzverstärker (OTA), um Differenzsignale in unsymmetrische Signale umzuwandeln. Ein OTA wird realisiert, indem die klassische Last durch Stromspiegel ersetzt wird.
Die Idee besteht darin, den Strom eines Pfades in den anderen zu spiegeln und zu subtrahieren. Angenommen, die Ströme in M1 und M2 seien
Wenn die Stromquelle durch einen NMOS realisiert wird, entsteht der typische 5-Transistor-OTA.
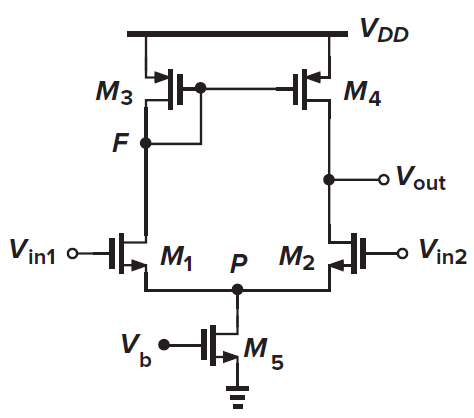
DC-Analyse des OTA
Wenn
AC-Analyse des OTA
Da die Schaltung nicht völlig symmetrisch ist, ist der Knoten P keine präzise virtuelle Masse mehr. Wir können die Nicht-Symmetrie durch eine Impedanzberechnung prüfen.
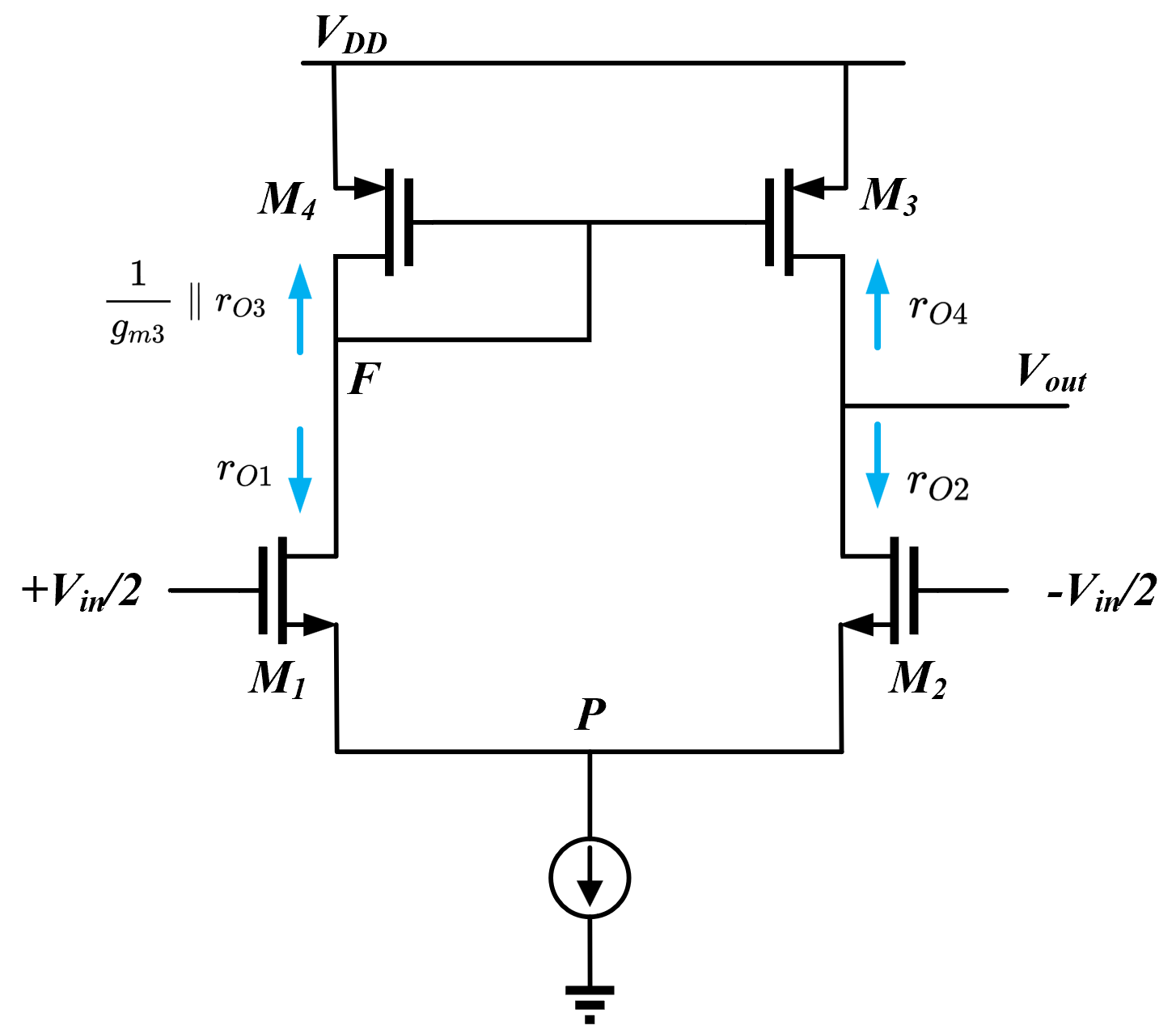
Wiederholen wir das Kleinsignalmodell eines MOSFETs. Die Impedanz von Drain gegen AC-Masse ist
Im Kleinsignalmodell des OTA ist die Impedanz am Knoten F gegen Masse (wenn VDD zu AC-Masse wird):
Da
Da die Ausgangsimpedanz sehr hoch ist, eignet sich die Schaltung gut für stromgesteuerte Lasten. Aufgrund der unterschiedlichen Impedanzen sind auch die Spannungshübe an den beiden Knoten verschieden.
Wir nehmen an, M1 und M2 seien identisch, also
Da
Unter Berücksichtigung des Stromspiegeleffekts ergibt sich als Ergebnis für die Verstärkung:
Aussteuerbereich (Headroom)
Damit der Stromspiegel (vor allem M4) gesättigt bleibt, muss
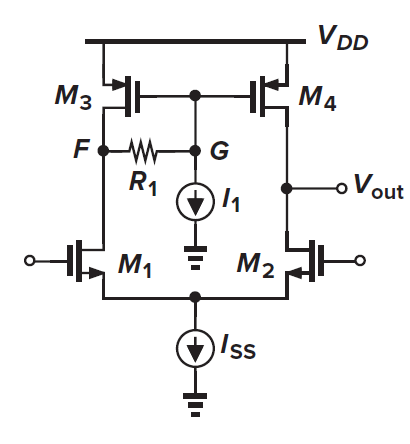
Durch den Widerstand
Gleichtakteigenschaften
Werden beide Eingänge verbunden, sind die Ströme in beiden Pfaden gleich. Da die Bauelemente paarweise identisch sind, müssen die Spannungen an F und am Ausgang gleich sein. Die Knoten können virtuell kurzgeschlossen werden.
Die Berechnung ergibt:
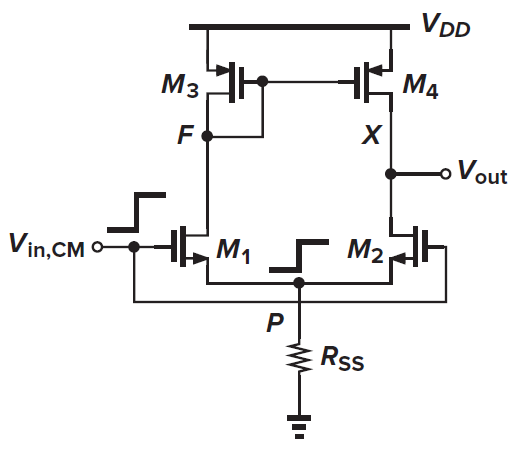
Fehlanpassung (Mismatch)
Bei einer Fehlanpassung (z. B. M1 und M2 nicht identisch) wird das Ausgangssignal verzerrt. Eine kleine Änderung der Eingangs-Gleichtaktspannung
Der zusätzliche Term im Zähler verdeutlicht den Einfluss der Steilheits-Fehlanpassung auf die Gleichtaktverstärkung.
Stromversorgungsunterdrückung (PSRR)
Der OTA hat eine sehr schlechte PSRR, da Rauschen auf der Versorgungsspannung
5. Frequenzgang
5.1 Pole und Nullstellen
Für ein elektrisches System kann seine Übertragungsfunktion ausgedrückt werden als
wobei
Beachten Sie, dass

Ein Nullstellenterm,
Dann trägt eine Nullstelle in der rechten Halbebene (RHP) zu einer ansteigenden Amplitude von 20 dB/Dekade bei. Die Nullstelle trägt auch eine Phasenverschiebung von
Ein Pol in der linken Halbebene (LHP) beeinflusst die Übertragungsfunktion mit
Eine LHP-Nullstelle trägt zu einer Amplitudenanstiegsrate von 20 dB/Dekade bei, aber zu einer Phasenverschiebung von
Ob es sich um eine Nullstelle oder einen Pol handelt, die Phasenverschiebung beträgt genau 45° bei der Frequenz, die dieser Nullstelle oder diesem Pol entspricht; erst wenn die Frequenz viel höher ist als diese Frequenz, nähert sich die Phasenverschiebung allmählich 90°. Unterschiedliche Nullstellen-Pol-Effekte können überlagert werden.
5.2 Miller-Effekt
Ein wichtiges Phänomen, das in vielen analogen (und digitalen) Schaltungen auftritt, steht im Zusammenhang mit dem „Miller-Effekt“, wie er von Miller in einem Theorem beschrieben wurde. Dieses Theorem wird üblicherweise zur Vereinfachung von Schleifen verwendet.
Millers Theorem: Wenn eine Impedanz

Der Beweis ist trivial:
Im Allgemeinen wird das feste Spannungsverhältnis (Verstärkung) durch den Hauptsignalpfad bereitgestellt, z. B. einen Verstärker. Daher ist die Miller-Äquivalenz nur für Signalpfade geeignet, die parallel zum Hauptpfad verlaufen.

In der Realität ist die Verstärkung normalerweise frequenzabhängig. Glücklicherweise sind für viele Näherungsanalysen keine präzisen Schaltungseigenschaften erforderlich. Daher verwenden Ingenieure oft die niederfrequente Verstärkung, um die Miller-Kapazität zu berechnen, und wenden dieses Ergebnis dann auf Hochfrequenzfälle an, obwohl die Miller-Äquivalenz streng genommen eine frequenzunabhängige Verstärkung voraussetzt.
Wenn Millers Theorem zur Ermittlung der Eingangs-Ausgangs-Übertragungsfunktion angewendet wird, kann es nicht gleichzeitig zur Berechnung der Ausgangsimpedanz verwendet werden. Um die Übertragungsfunktion abzuleiten, legen wir eine Spannungsquelle an den Eingang der Schaltung an und erhalten einen Wert für
Im Allgemeinen führt eine Kapazität in einer Rückkopplungsschleife zu einer Nullstelle. Die Anwendung der Miller-Äquivalenz kann jedoch die Nullstelle eliminieren. Nehmen wir das folgende Beispiel:

Wir nehmen an,
Es gibt einen Pol bei

Wenn wir jedoch die Miller-Äquivalenz anwenden, wie in der rechten Abbildung, wird die Übertragungsfunktion zu
Der Pol ist
Wir sehen, dass die Miller-Äquivalenz eine Nullstelle fallen lassen kann. Übrigens stimmt das Ergebnis von Miller nicht vollständig mit dem präzisen Ergebnis überein. Daher wenden wir den Miller-Effekt normalerweise an, um den Polpunkt abzuschätzen, nicht um die gesamte Übertragungsfunktion zu berechnen.
Im Allgemeinen können Polpunkte durch Knoten abgeschätzt werden. Nehmen Sie das obige Beispiel, die rechte Abbildung. Es ist offensichtlich, dass der Ausgangsknoten von anderen Teilen der Schaltung entkoppelt ist. Der Knoten verbindet nur einen Widerstand und einen Kondensator, die ein Tiefpassnetzwerk bilden. Daher führt das Tiefpassnetzwerk einen Pol erster Ordnung ein.
Die Verbindung von Polen mit Knoten ist eine Methode, die üblicherweise verwendet wird.
Um die unterdrückte Nullstelle zu approximieren, legen Sie den Ausgangsklemmen Masse und setzen Sie den Ausgangsstrom auf 0.
5.3 CS-Stufe
Nun müssen wir die parasitären Kapazitäten berücksichtigen.

Der Hauptpfad ist offensichtlich der MOSFET, daher kann die
und am Ausgangsknoten
Vergessen Sie nicht, die unterdrückte Nullstelle zurückzuholen.

Da

Der erste Pol wird als dominanter Pol bezeichnet, der den Frequenzgang am stärksten beeinflusst.
Wenn Sie direkt aus dem Kleinsignalmodell berechnen, erhalten Sie eine Übertragungsfunktion der Form:
In den meisten Schaltungen ist der Abstand zwischen den Polen sehr groß, sodass Sie die Nennergleichung nicht präzise lösen müssen. Stattdessen approximieren Sie mit dem Satz von Vieta:
Approximieren Sie
5.4 CG-Stufe und Source Follower
Der Frequenzgang der CG-Stufe ist einfach, da keine Schleife vorhanden ist, wenn KLM vernachlässigbar ist.

Am Eingangsknoten ist die Quellimpedanz
Der Ausgangsknoten ist einfach
Wenn
Für Source Follower, da seine Verstärkung ungefähr 1 ist, nicht sehr groß, weist er einige interessante Eigenschaften auf.

Die vollständige Übertragungsfunktion ist
Wenn die beiden Pole als weit voneinander entfernt angenommen werden, hat der untere Pol eine Größe von
Beachten Sie, dass, wenn Sie den Miller-Effekt anwenden möchten, Sie feststellen werden, dass die Miller-äquivalente Kapazität verschwindet, da die Verstärkung
Berechnen wir nun die Eingangsimpedanz.

Dann
Bei niedrigen Frequenzen gilt
Bei hohen Frequenzen gilt
Beachten Sie, dass ein
Vernachlässigen Sie die Lastkapazität
ergibt
Bei niedrigen Frequenzen gilt
5.5 Kaskode
Kaskodierung erweist sich als vorteilhaft zur Erhöhung der Spannungsverstärkung von Verstärkern und der Ausgangsimpedanz von Stromquellen, während sie auch eine Abschirmung bietet.

Am Knoten A wird
Am Knoten X ist seine Impedanz die Quellimpedanz von M2
Der Knoten Y ist einfacher. Bei vernachlässigtem KLM, Impedanz
5.6 Differenzpaar
Die Polabschätzung folgt demselben Muster und wir wiederholen sie nicht. Was bei Differenzpaaren besonders ist, ist die Gleichtaktunterdrückung (CMRR). Betrachten Sie ein vollständiges Differenzpaar mit passiver Last.

Mit
Dann kommt die Gleichtaktantwort. Die Schaltung wird zu

Die Kapazität kann in eine Impedanz absorbiert werden

KCL ergibt
ergibt
Die differentielle Ausgangsspannung
d.h.
Beachten Sie, dass die CMRR eine Nullstelle bei

Wenn es um Differenzpaare mit aktiver Last (OTA) geht, ist das Ergebnis viel komplexer.

Die Abbildung rechts wird durch Ersetzen von
Aber in der Praxis können Sie Pole immer noch mit unserer klassischen Methode abschätzen. Am Ausgangsknoten
Am Eingangsknoten vernachlässigen Sie
6. Rauschen
6.1 Rauschtheorie
Rauschen ist ein zufälliges Signal, das nicht vorhergesagt werden kann, selbst wenn alle vergangenen Signale bekannt sind. Daher muss die Untersuchung von Rauschen mit statistischen Modellen abgeschlossen werden. In den meisten Fällen ist die durchschnittliche Leistung vorhersagbar. Wir beobachten das Signal über einen Zeitraum
Aber Rauschen ist ein zufälliges Signal. Daher ändert sich die durchschnittliche Leistung mit der Wahl von
Um alle Arten von Signalen (wie Strom) anzupassen, entfernen wir den Widerstand im Nenner.
Dieses Konzept wird mit der Einführung des Frequenzspektrums vielseitiger und auch praktischer. Aus Sicht des Frequenzbereichs sollte das Spektrum die gleiche Energie (Leistung) liefern wie der Zeitbereich.
Das
Offensichtlich wird
Satz: Wenn ein Signal mit dem Spektrum
Der Betrag der Übertragungsfunktion wird durch die Tatsache eingeführt, dass PSD Energie trägt und Energie positiv sein muss, während das Quadrat aus der quadrierten Dimension von
Für ein reelles Signal
Die gemeinsame Auswirkung zweier Rauschquellen ist nicht immer unabhängig. Addieren wir zwei Rauschsignale und prüfen die Leistung
Wenn der Kreuzterm verschwindet, werden die beiden Rauschquellen als unkorreliert bezeichnet; andernfalls sind sie korreliert.
In den meisten Fällen sind Rauschquellen unkorreliert oder wir können sagen, sie sind unabhängig. Zum Beispiel: das Rauschen, das von zwei konzentrierten Widerständen eingeführt wird. Korreliertes Rauschen entsteht immer aus derselben Quelle oder folgt einer festen Übertragungsbeziehung. Zum Beispiel summiert sich das Netzteilrauschen, das auf verschiedene Stufen angewendet wird, schließlich zur gleichen Ausgabe. Sie stammen aus derselben Quelle, daher werden diese Rauschquellen als korreliert betrachtet.
Manchmal ist auch die Amplitude wichtig. Dann ziehen wir die Quadratwurzel aus dem PSD und erhalten das Amplitudenspektrum. Aber beachten Sie, dass die Amplitude nicht
Um die Rauschleistung eines Systems zu messen, führen wir einen Index namens “Signal-Rausch-Verhältnis” (SNR) ein, definiert als
SNR wird üblicherweise in Dezibel (dB) gemessen
Beachten Sie, dass der Faktor 10 und nicht 20 ist, da SNR ein Leistungsverhältnis ist. Der Faktor 20 wird für Amplitudenverhältnisse verwendet. Der Faktor 2 ergibt sich aus der Anwendung des Logarithmus auf eine quadrierte Größe (da die Leistung proportional zum Quadrat der Amplitude ist).
6.2 Thermisches Rauschen
Thermisches Rauschen von Widerständen
Konzentrierte Widerstände führen aufgrund der thermischen Fluktuation ihrer Atome Rauschen ein. Diese Art von Rauschen wird als thermisches Rauschen bezeichnet. Da die Fluktuation frequenzunabhängig ist, muss das PSD flach sein. Rauschen mit dieser Eigenschaft wird als weißes Rauschen bezeichnet. Im Allgemeinen kann das thermische Rauschen von Widerständen ausgedrückt werden als
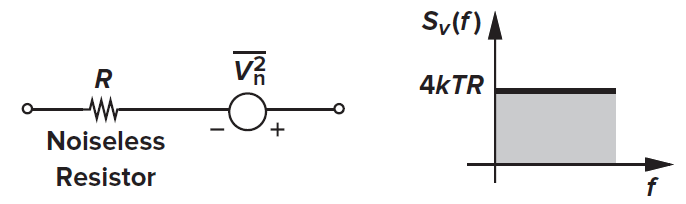
wobei
Da wir das Rauschen mit der Spannungsamplitude ausdrücken können (offensichtlich über den Thevenin-Satz), können wir das Rauschen auch über den Strom ausdrücken, wenn auch über den Norton-Satz.
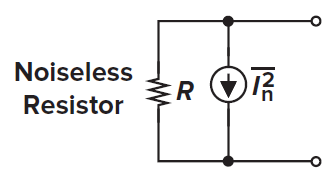
Um mit dem Thevenin-Modell übereinzustimmen, muss der Stromrauschterm modifiziert werden
Thermisches Rauschen von MOSFETs
MOSFETs weisen ebenfalls thermisches Rauschen auf, das hauptsächlich durch den DS-Widerstand verursacht wird. Das Kanalrauschen kann durch eine parallele Stromquelle zwischen Drain und Source modelliert werden.
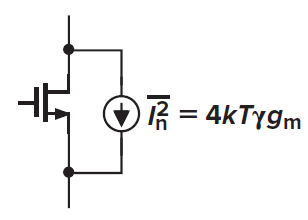
Mit Rauschstrom-PSD
Das
Ein weiteres Rauschen entsteht durch den Verteilungswiderstand am Gate. Bei einem relativ breiten Gerät ist das Kanalrauschen typischerweise vernachlässigbar und der Gate-Widerstand wird dominant. Nehmen wir nun ein Beispiel des einfachsten MOSFETs.
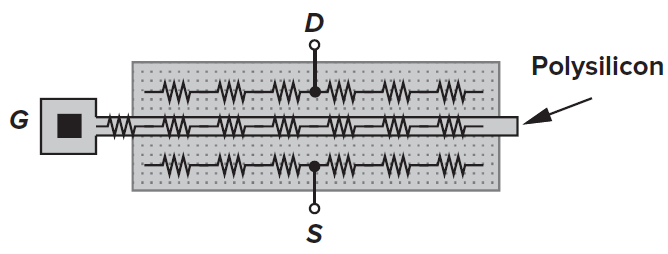
Angenommen, der gesamte End-to-End-Widerstand des Gate-Polysiliziums (von links nach rechts) ist
Die von einem kleinen Abschnitt beigesteuerte Transkonduktanz
Der Widerstand von Eingang zu
Dann ist der gesamte Strom, der vom Gate-Spannungsrauschen übertragen wird
Daher kann der verteilte Widerstand am Gate als konzentrierter Widerstand im Wert von
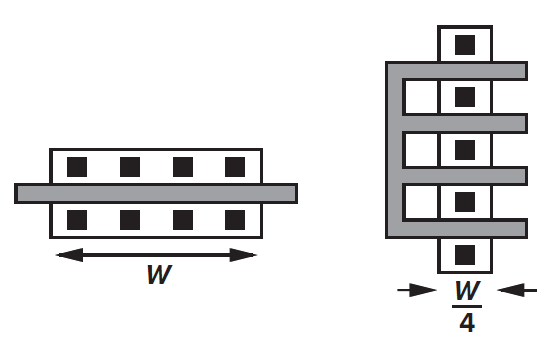
Angenommen, der gesamte End-to-End-Widerstand im ersten Layout ist
6.3 Flicker-Rauschen
Diese Art von Rauschen tritt im Kanal von MOSFETs auf. Da der Siliziumkristall nicht vollkommen perfekt sein kann, muss er einige Defekte enthalten. Wenn der Kanal eingeschaltet wird, können diese Defekte zufällig Elektronen einfangen und freisetzen. Von außen betrachtet ändert sich die Elektronenanzahl im Gerät zufällig. Rauschen, das durch die Defekte verursacht wird, wird als Flicker-Rauschen bezeichnet.
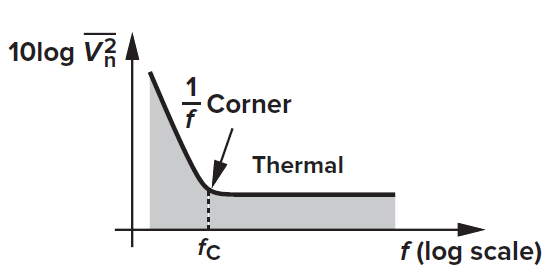
Offensichtlich werden langsamere Elektronen leichter eingefangen und freigesetzt, während schnellere schwieriger sind. Daher ist das PSD des Flicker-Rauschens nicht flach. Stattdessen ist das
Überlagert auf dem Gate.
Es wird angenommen, dass einige andere Phänomene ebenfalls zum Flicker-Rauschen beitragen. Daher kann der Ausdruck in der Realität komplexer sein. Aber bisher weiß niemand warum.
Offensichtlich wird der MOS gleichzeitig vom thermischen Rauschen und vom Flicker-Rauschen beeinflusst. Im niederfrequenten Bereich dominiert das Flicker-Rauschen, während im Hochfrequenzbereich das thermische Rauschen die wichtigste Rolle spielt. Die Wende tritt bei der Frequenz von
Diese Frequenz wird als Eckfrequenz bezeichnet
6.4 Allgemeines Rauschmodell
Betrachten Sie eine allgemeine Schaltung mit einem Eingangsport und einem Ausgangsport. Wie quantifizieren wir die Auswirkung von Rauschen hier? Der natürliche Ansatz wäre, den Eingang auf Null zu setzen und das Gesamtrauschen am Ausgang aufgrund verschiedener Rauschquellen in der Schaltung zu berechnen. Dies ist tatsächlich die Art und Weise, wie Rauschen im Labor oder in Simulationen gemessen wird.
Das ausgangsseitige Rauschen erlaubt jedoch keinen fairen Vergleich der Leistung verschiedener Schaltungen, da es von der Verstärkung abhängt. Wenn wir nur das Ausgangsrauschen betrachten, könnten wir zu dem Schluss kommen, dass die Schaltung mit zunehmender Verstärkung rauschender wird, ein falsches Ergebnis, da eine größere Verstärkung auch ein proportional höheres Signalniveau am Ausgang liefert. Das heißt, das Ausgangs-SNR hängt nicht von der Verstärkung ab.
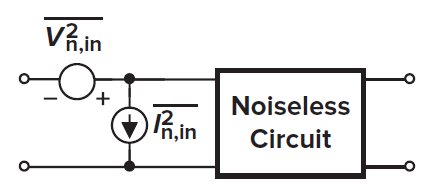
Um das durch die Verstärkung verursachte Rätsel zu lösen, setzen wir das gesamte Rauschen am Eingangsanschluss anstelle des Ausgangsanschlusses an und erhalten das eingangsbezogene Rauschen
Das eingangsbezogene Rauschen gibt an, wie stark das Eingangssignal durch das Rauschen der Schaltung beeinträchtigt wird. Es kann jedoch nicht durch Experimente gemessen werden, da das eingangsbezogene Rauschen nur eine mathematische Äquivalenz ist. Physikalisch sind die Quellen immer noch im System verteilt, nicht am Eingangsanschluss.
Es gibt jedoch immer noch ein Problem: Wenn wir ein einfaches Thevenin-Modell (nur eine Spannungsquelle) anwenden, impliziert dies, dass das Ausgangsrauschen verschwindet, wenn der Ausgangswiderstand der letzten Stufe viel größer ist als die System-Eingangsimpedanz, was mit den experimentellen Beobachtungen im Widerspruch steht. Ein einfaches Norton-Modell stößt auf das gleiche Problem, wenn der Quellwiderstand viel kleiner ist als die Eingangsimpedanz. Um das Problem zu lösen, müssen wir die beiden Modelle gleichzeitig anwenden: Ein eingangsbezogenes Rauschen besteht aus einer Spannungsquelle und einer Stromquelle.
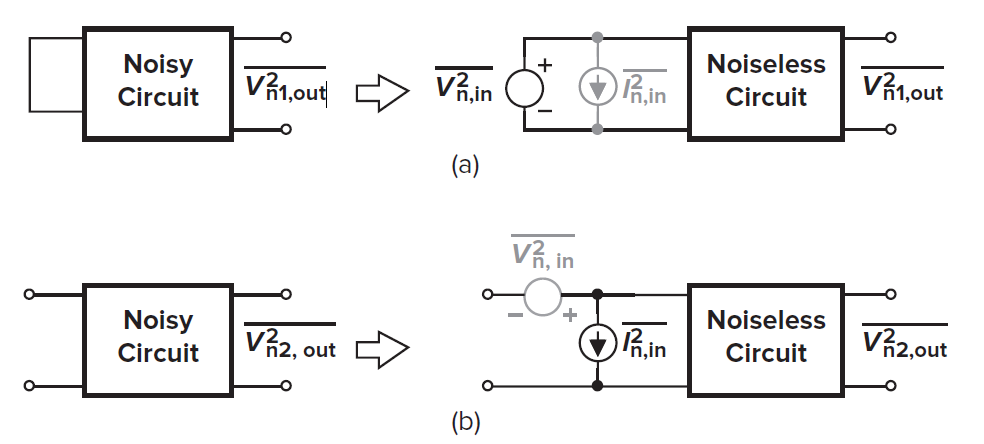
Um dies im Detail zu veranschaulichen, nehmen wir das Beispiel der CS-Stufe und ignorieren das Flicker-Rauschen.
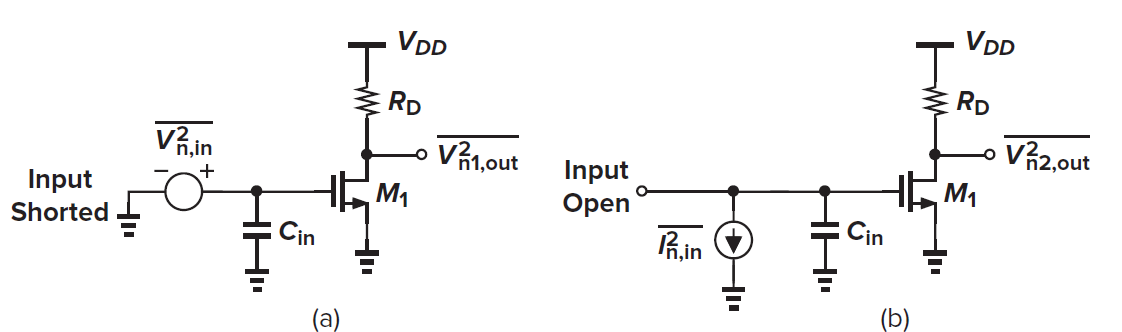
Die erste Abbildung zeigt die Auswirkung der Spannungs-Komponente. Das Ausgangsrauschen ist eine Überlagerung des thermischen Rauschens von
Die Verstärkung ist
Um den eingangsbezogenen Strom zu erhalten, müssen wir die Eingangskapazität einbeziehen. Der Ausgang wird durch die Spannung erzeugt, die durch den Strom auf der Kapazität angehoben wird.
Daher
Das Ergebnis ist
Angenommen, die Quellenimpedanz ist
Aus der obigen Gleichung können wir sehen, dass, wenn
Wir schließen daraus, dass der eingangsbezogene Rauschstrom vernachlässigt werden kann, wenn
Einige mögen bezweifeln, dass die beiden Quellen sich in einigen der Quellen im System überlappen und korreliert werden. Anfangs nehmen wir an, dass sie unkorreliert sind, und durch zwei Randbedingungen haben wir die Quellen gelöst. Mathematisch haben die beiden Quellen eine eindeutige Lösung. Daher ist es nicht notwendig, sich um die Quellenüberlappung zu sorgen.
6.5 Rauschen in einstufigen Verstärkern
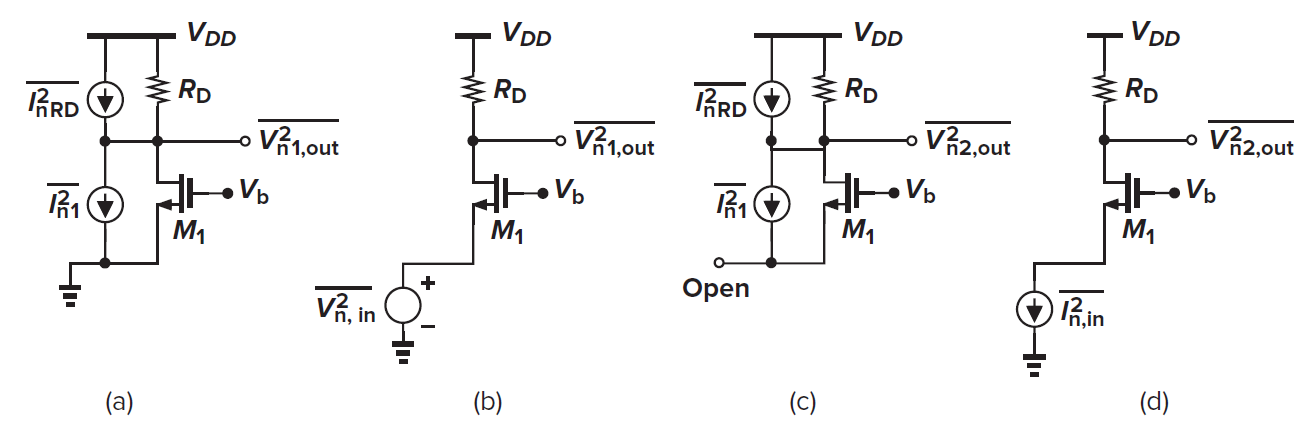
Da das Gate eines MOSFET üblicherweise als Eingangsklemme dient und das Gate eine hohe Impedanz besitzt. Daher treten bei der Stromquelle des Rauschens einige Probleme auf. Um das “Problem der hohen Impedanz” zu lösen, sollte die Stromquelle an andere Stellen verschoben werden. Diese Methode ist nur für einstufige Verstärker anwendbar.
Lemma: Die Spannungsquelle des Rauschens
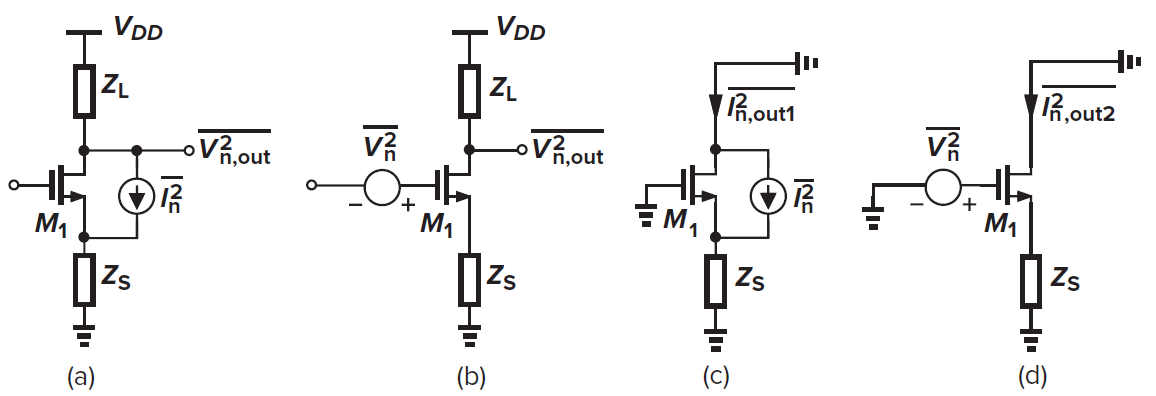
Da die Schaltungen gleiche Ausgangsimpedanzen haben, untersuchen wir einfach die kurzgeschlossenen Ausgangsströme. Wenn der Ausgangsstrom nur von der Stromquelle geliefert wird (Abb. c),
Gelöst
Wenn nur von der Spannungsquelle geliefert,
Gelöst
Setzen wir nun
CS-Stufe
Wir haben dies im Beispiel in Abschnitt 6.4 berechnet. Wir wiederholen es nicht. Nun konzentrieren wir uns nur auf das Flicker-Rauschen.
Da das Flicker-Rauschen direkt auf das Gate überlagert werden kann, ist das gesamte eingangsbezogene Rauschen
Um das Rauschen zu reduzieren, sollte die Transkonduktanz maximiert werden.
CG-Stufe
Eine CG-Stufe dient als Strompuffer. Am Ausgangsterminal setzt sich das Rauschen aus dem thermischen Rauschen von
Erinnern wir uns, dass der Gewinn der CG-Stufe
Dann den Eingang offen lassen. Da die Source-Klemme offen ist, fließt das MOS-Rauschen zur Source und trifft auf eine unendliche Impedanz, wodurch die Source-Spannung abrupt ansteigt und die
Für Flicker-Rauschen wird es ursprünglich auf das Gate von MOS angewendet, d. h.
Teilen durch den Gewinn, um die eingangsbezogene Spannung zu erhalten
Der eingangsbezogene Strom ist offensichtlicher
Source Follower
Das Rauschen stammt von beiden Bauteilen. Flicker-Rauschen vernachlässigen. Das Ausgangsrauschen
Der Gewinn eines Source Followers ist
Dann zurück zum Eingang übertragen
Kaskodenstufe
M2 entfällt, da am Knoten X der Rauschstrom von M2 gezwungen wird, dem von M1 gleich zu sein.
6.6 Differenzverstärkerstufen
Differenzspiegel
Da die Stromrauschen auf den beiden Pfaden nicht korreliert sind und niemand sagen kann, dass sie eine inverse Phase besitzen, kann der Source-Knoten nicht als virtuelle Masse betrachtet werden. Daher ist die Äquivalenz der halben Schaltung hier nicht anwendbar.
Angenommen,
Übertragen auf den Eingang, ist der Gewinn
Das eingangsbezogene Rauschen muss in das differentielle Signal
Das Flicker-Rauschen funktioniert genauso
Berücksichtigen Sie dann das Rauschen von
Angenommen,
Somit kann das Rauschen von
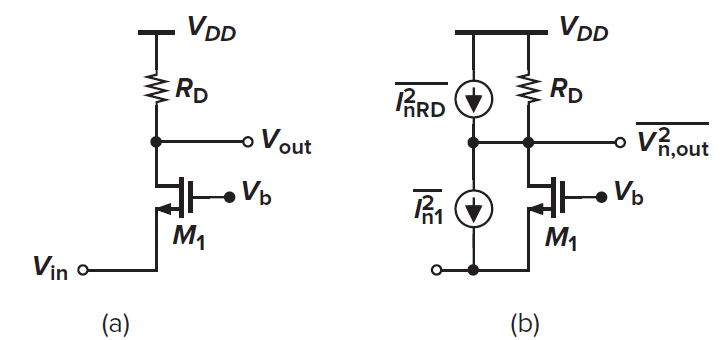
Stromspiegel
Der REF-MOS erzeugt ein thermisches Stromrauschen
Beachten Sie, dass der REF-MOS im Diodenmodus angeschlossen ist. Von der Gate-Seite (tatsächlich von der Drain-Seite) betrachtet, beträgt die Impedanz
Der Eingang von M1 wird zuerst durch diese Übertragungsfunktion verarbeitet und wird dann durch
Daher ist das durch thermisches Rauschen verursachte Rauschen (einschließlich des thermischen Rauschens von M1 selbst)
Was das Flicker-Rauschen betrifft, ersetzen Sie einfach
OTA
M1 erzeugt ein thermisches Rauschen
Überlagert mit den beiden Flicker-Rauschen
dann werden diese Spannungsrauschen durch
$$
\overline{I_{n,out}^2} = g_{m4}\left(4kT\gamma\dfrac{g_{m1} + g_{m3}}{g_{m3}} + \dfrac{K}{C_{ox}f}\left(\dfrac{1}{(WL)3} + \dfrac{1}{(WL)4}\right)\right) + 4kT\gamma g{m2} + 4kT\gamma g{m4}
$$
Angenommen, M1 und M2, M3 und M4 sind jeweils identisch, dann kann der Strom vereinfacht werden
Mit dem Flicker-Rauschen von M1 und M2
Die Ausgangsimpedanz des OTA ist
$$
\overline{V_{n,out}^2} = \left(8kT\gamma (g_{m1,2} + g_{m3,4}) + \dfrac{2Kg_{m3,4}^2}{C_{ox}(WL){3,4}f}\right)(r{O2} \parallel r_{O4})^2
$$
Teilt man das Ergebnis durch
Vergessen Sie nicht das Flicker-Rauschen von M1 und M2
$$
\overline{V_{n,in}^2} = 8kT\gamma \left(\dfrac{1}{g_{m1,2}} + \dfrac{g_{m3,4}}{g_{m1,2}^2}\right) + \dfrac{2Kg_{m3,4}^2}{g_{m1,2}^2C_{ox}(WL){3,4}f} + \dfrac{2K}{C{ox}(WL)_{1,2}f}
$$
7. Feedback
7.1 Primäre Feedback-Theorie
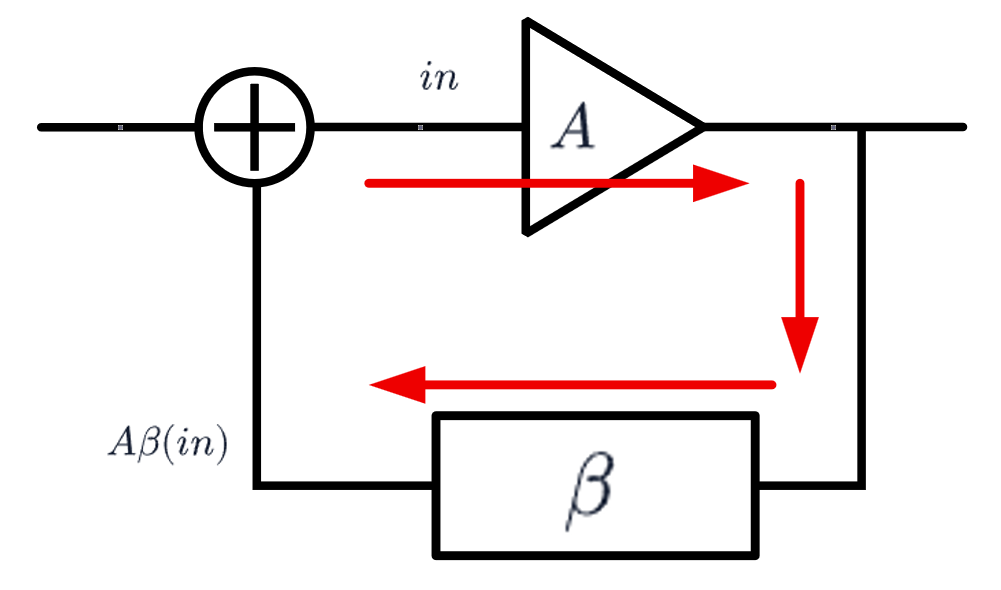
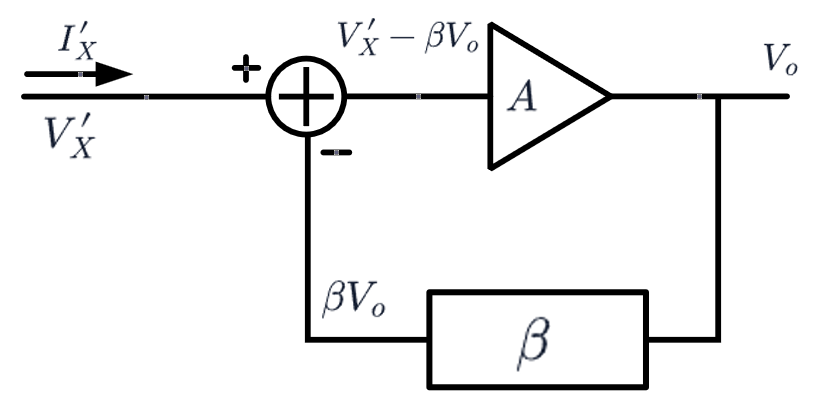
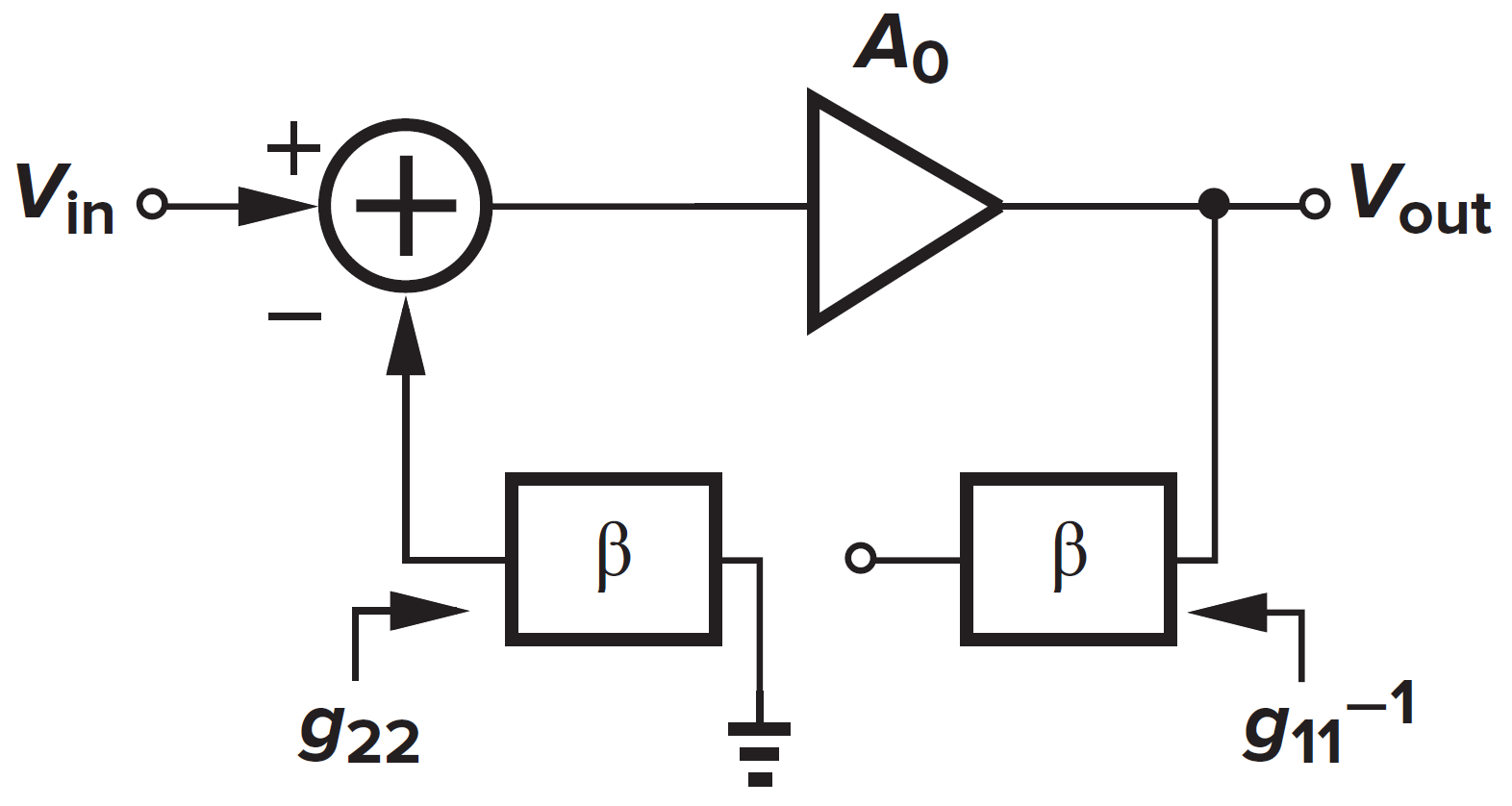
Negative Rückkopplung wird in analogen Schaltungen häufig eingesetzt. Sie ermöglicht eine hochpräzise Signalübertragung, geringere Linearität und bessere Stabilität. Die folgende Abbildung zeigt ein typisches Diagramm der negativen Rückkopplung.
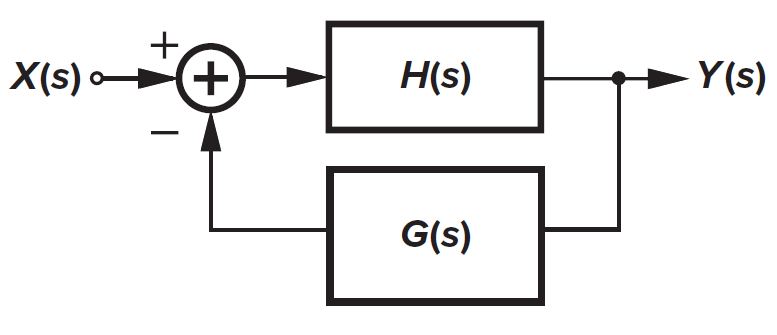
Wir nennen
Dieser Prozess wird durch die folgenden Gleichungen verdeutlicht:
Beide Gleichungen müssen gleichzeitig gelten, um die Stabilität des gesamten Systems aufrechtzuerhalten. Kombinieren Sie die beiden Gleichungen und lösen Sie sie auf:
Im Allgemeinen wird
Diese Formel führt einige erstaunliche Eigenschaften ein:
Verstärkungsunempfindlichkeit:
Erinnern Sie sich an die CS-Stufe, die wir früher erwähnt haben. Die AC-Verstärkung wird durch
Dann wird die Gesamtverstärkung (verifizieren Sie sie mit KCL und KVL):
Im Allgemeinen ist die intrinsische Verstärkung eines MOSFETs
Nun wird die Verstärkung fast vollständig von externen Komponenten gesteuert, genauer gesagt, da die Variation von Prozess und Temperatur die Kondensatoren nicht verändert.
Im Allgemeinen gilt: Wenn die Schleifenverstärkung des Systems
Die Schleifenverstärkung
Wie findet man also die Schleifenverstärkung? Offensichtlich wirkt die Schleifenverstärkung auf ein bestimmtes Signal in der Schaltung, daher sollten wir unabhängige Quellen eliminieren, um deren Störungen zu vermeiden. Der erste Schritt ist also, den Eingang auf 0 zu setzen. Der nächste Schritt ist, die Schleife an einer Stelle zu unterbrechen und ein Testsignal in die richtige Richtung einzuspeisen. Folgen Sie dann dem Signal durch die Schleife, bis es zum Unterbrechungspunkt zurückkehrt. Wir nehmen wieder die CS-Stufe mit Rückkopplung als Beispiel.
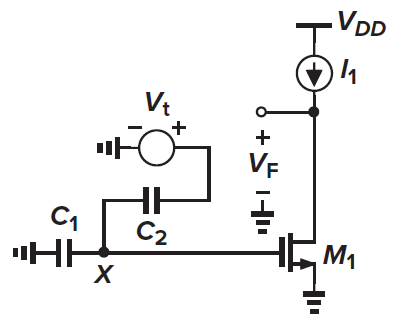
Am Knoten X ist das Signal
Daher erhält man die Schleifenverstärkung durch:
Normalerweise unterbrechen wir den Eingangsterminal des Rückkopplungsnetzwerks, da dies normalerweise der systematische Ausgangsknoten ist.
Impedanzmodifikation
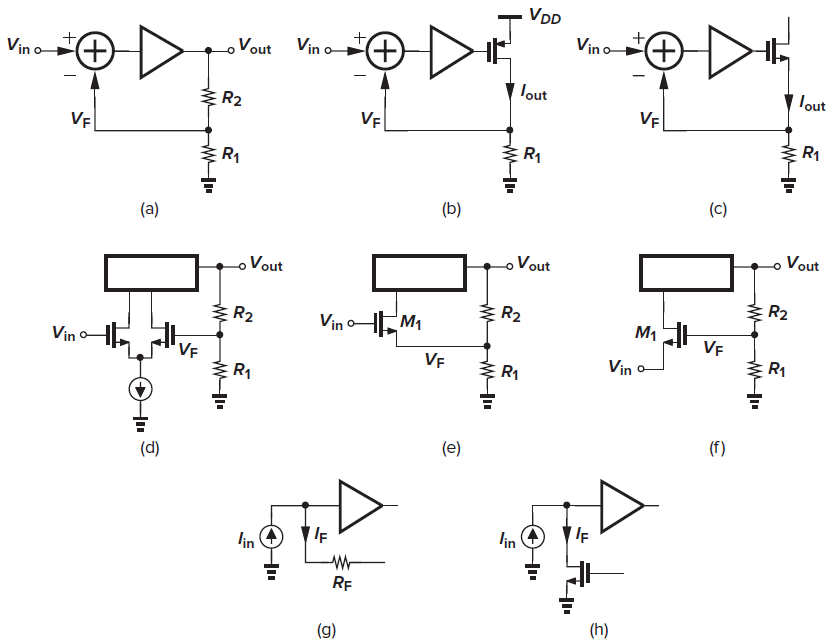
Rückkopplung modifiziert auch die Impedanz an den Ein- und Ausgangsterminals, und wie die Impedanz geändert wird, hängt von den Rückkopplungstopologien ab. Am Ausgangsterminal kann das Rückkopplungsnetzwerk ein Spannungs- oder Stromsignal abtasten; Am Eingangsterminal kann das Rückkopplungsnetzwerk auch eine Spannung oder einen Strom als Rückkopplungssignal zurücksenden. Die beiden Auswahlen an den beiden Terminals bilden 4 Rückkopplungstopologien:
- Spannung - Spannung: Spannung abtasten, Spannung zurückführen
- Spannung - Strom: Spannung abtasten, Strom zurückführen
- Strom - Spannung: Strom abtasten, Spannung zurückführen
- Strom - Strom: Strom abtasten, Strom zurückführen
Spannungsrückführung wird auch als serielle Rückkopplung bezeichnet und Stromrückführung als Parallelrückkopplung.
Die Schlussfolgerung ist:
Spannungsabtastung reduziert die Ausgangsimpedanz auf
Wir beweisen die serielle Spannungsrückführung als Beispiel. Zuerst richten wir einen Verstärker mit Verstärkung
Zuerst kommt die serielle Spannungsrückkopplung. Um die Ausgangsimpedanz zu berechnen, eliminieren Sie zuerst die Eingabe (unabhängige Quelle).
Das Rückkopplungsnetzwerk
was impliziert:
Was die Eingangsimpedanz betrifft:
Die Beziehung ist klar:
was ergibt:
Der Eingangsstrom des Verstärkers ist:
wodurch erhalten wird:
Sie können andere Topologien überprüfen. Beachten Sie jedoch, dass die Verstärkung und der Rückkopplungskoeffizient bei Umwandlungen von Spannung zu Strom dimensionsbehaftet sein können. Wenn Ihre Topologie beispielsweise Strom abtastet und Spannung zurückführt, sollte die Dimension Ihres
Aber wie identifiziert man die Rückkopplungstopologien? Für Spannungsrückkopplungssignale sollten Sie sie in Reihe schalten, und für Stromsignale sollten Sie sie parallel schalten. Diese Schlussfolgerung lässt sich leicht aus grundlegenden Schaltungsgesetzen ableiten.
Hier sind einige Beispiele für die 4 Rückkopplungstopologien.
Bandbreitenmodifikation
Rückkopplung verschiebt die Pole in höhere Frequenzbereiche und erhöht die Gesamtbandbreite des Systems (normalerweise auf Kosten der Verstärkung). Angenommen, die Open-Loop-Verstärkung ist frequenzabhängig und enthält einen Pol erster Ordnung:
Die geschlossene Schleifenverstärkung ist ebenfalls frequenzabhängig:
Offensichtlich erhöht sich die Polfrequenz, während die Verstärkung auf
Nichtlinearitätsreduktion
Rückkopplung reduziert auch die Linearität der Open-Loop-Verstärkung. Angenommen, die ursprüngliche Open-Loop-Verstärkung ist
Rauschverhalten: Keine Verbesserung
Im Vergleich zu den oben genannten hervorragenden Eigenschaften wird das Rauschverhalten überhaupt nicht verbessert. Angenommen, in einer typischen Spannungs-Spannungs-Rückkopplungsschleife ist das eingangsbezogene Rauschen des Verstärkers
Das gesamte eingangsbezogene Rauschen ist immer noch
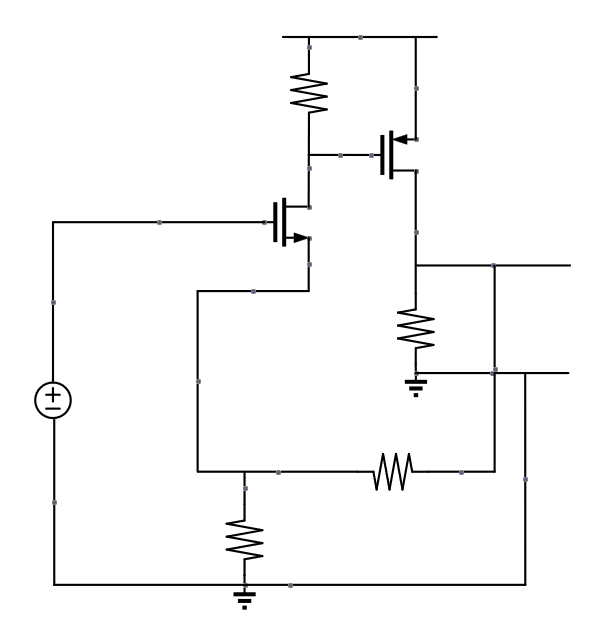
Beachten Sie, dass in den meisten obigen Analysen der interessierende Ausgang derselbe ist wie die vom Rückkopplungsnetzwerk erfasste Qualität, aber das ist nicht immer der Fall. Nehmen Sie das Beispiel der folgenden Schaltung. In dieser Schaltung befindet sich das erfasste Signal am Source von M1, während der Ausgang am Drain liegt.
In solchen Fällen ist das eingangsbezogene Rauschen der geschlossenen Schleifenschaltung möglicherweise nicht dasselbe wie das der offenen Schleifenschaltung, auch wenn das Rückkopplungsnetzwerk rauschfrei ist. Vereinfacht gesagt, berücksichtigen wir nur das Rauschen von
Der Ausgang:
Dann ist das eingangsbezogene Rauschen, das durch
In Open-Loop-Fällen (Masse am negativen Eingang) werden die Gleichungen:
In diesem Fall verschlechtert sich die Rauschleistung aufgrund der Rückkopplung.
7.2 Probleme der primären Theorie
Im letzten Abschnitt haben wir die grundlegende Theorie der Rückkopplung geklärt. Wir haben jedoch viele Faktoren vernachlässigt, die das Ergebnis unserer Analyse beeinflussen können. Wenn es um nicht sehr ideale Fälle geht, zum Beispiel wenn die Schleifenverstärkung
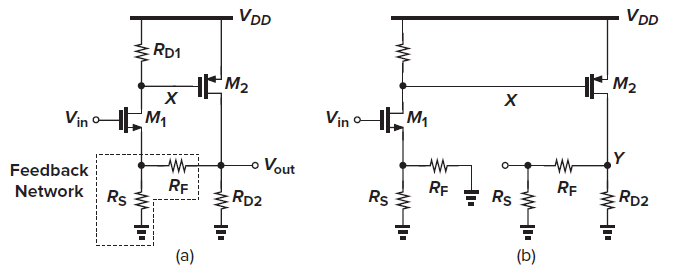
Das erste Problem ist die Stromleckage in das Rückkopplungsnetzwerk. In der primären Theorie wird das Rückkopplungsnetzwerk mit einer unendlichen Eingangsimpedanz (z. B. Spannungsabtastung) angenähert und absorbiert keinen Strom vom Ausgang. In der Praxis muss es jedoch eine endliche Impedanz besitzen. Die zusätzliche Absorption von Ausgangsstrom muss zu einer Verringerung der Open-Loop-Verstärkung führen. Zum Beispiel die CS-Stufe mit einer
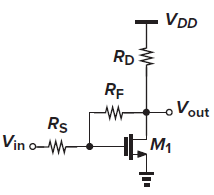
In dieser Schaltung ist der Eingang des MOSFETs nicht mehr das direkte Eingangssignal. Stattdessen erleidet das am Gate angelegte Signal eine Dämpfung aufgrund des Rückkopplungsnetzwerks.
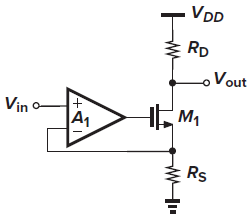
Das zweite Problem ist, dass einige Schaltungen nicht eindeutig in einen Vorwärtszweig und ein Rückkopplungsnetzwerk zerlegt werden können. Im folgenden zweistufigen Verstärker ist es unklar, ob
Das dritte Problem ist die nicht-kanonische Topologie. Das am häufigsten verwendete Beispiel ist die Source-degenerated CS-Stufe. Sie hat überhaupt keine Schleife.
Das vierte Problem sind die bilateralen Pfade in der Schleife. Einige Schaltungen können Vorwärts- oder Rückwärtsflusswege enthalten. Diese gemischten Pfade erschweren die Analyse.
Das fünfte Problem ist, dass einige Schaltungen mehrere Rückkopplungsmechanismen oder, wie wir sagen, Mehrfachschleifen enthalten. Stellen Sie sich zum Beispiel einen zweistufigen Verstärker mit Rückkopplung vor, aber die erste Stufe wird durch eine Source-degenerated CS-Stufe realisiert. Dann enthält diese Schaltung zwei Mechanismen.
Aufgrund dieser Probleme benötigen wir eine fortgeschrittene Theorie für Rückkopplung: Zwei-Port-Modell und Bode-Methode.
7.3 Zwei-Port-Modell-Methode
Um die oben genannten Probleme zu lösen, können Zwei-Port-Modelle angewendet werden. Erinnern Sie sich an das Zwei-Port-Modell in der grundlegenden Schaltungstheorie, es gibt 4 Arten von Zwei-Port-Modellen: Z, Y, G und H.
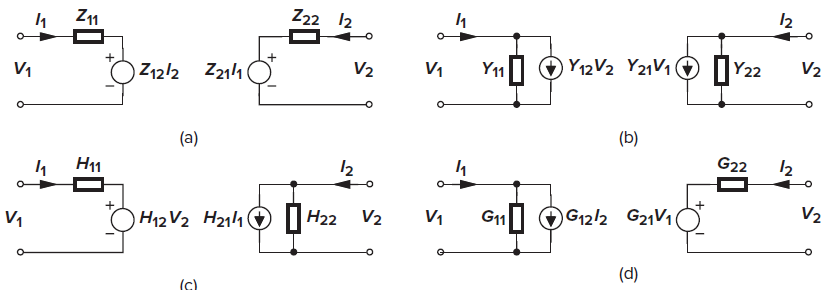
Diese vier Modelle sind tatsächlich Kombinationen aus dem Thevenin-Modell und dem Norton-Modell an den beiden Ports. Jeder Port enthält eine Eigenantwortkomponente und eine Interaktionskomponente. Zum Beispiel besteht das Z-Modell aus zwei Thevenin-Modellen. Der linke Port erfüllt:
Hier repräsentiert
Alle vier können alle Schaltungsmodule modellieren. Das Schlüsselproblem ist: Welches ist am besten geeignet. In grundlegenden Theoriekursen rezitieren Studenten sie immer. Aber tatsächlich wird dies durch die Port-Eigenschaft bestimmt: Wir wählen ein geeignetes Modell, um unendliche Impedanzen in Reihenschaltung und Nullimpedanzen in Parallelschaltung zu vermeiden.
Stellen Sie sich eine Thevenin-Quelle in Ihrem Kopf vor. Wenn Sie einen Port mit niedriger Impedanz ausdrücken möchten, können Sie einfach die Innenimpedanz auf Null setzen, und Sie erhalten eine ideale Spannungsquelle. Aber wenn Sie denselben Port mit einem Norton-Modell modellieren, müssen Sie die Stromquelle kurzschließen, und sie wird zu einem unabhängigen System und liefert keine Signale nach außen. Und dasselbe gilt für Ports mit hoher Impedanz. Ein Thevenin-Modell liefert eine geöffnete Spannungsquelle, was das Modell bedeutungslos macht. Nun können wir die Schlussfolgerung ziehen:
Das Thevenin-Modell eignet sich für Ports mit niedriger Impedanz, während das Norton-Modell für Ports mit hoher Impedanz geeignet ist.
Kombiniert mit unseren Anforderungen: Spannungssignale bevorzugen einen Eingang mit hoher Impedanz und einen Ausgang mit niedriger Impedanz, Stromsignale bevorzugen einen Eingang mit niedriger Impedanz und einen Ausgang mit hoher Impedanz. Sie können bestimmen, welches Modell Sie gemäß der Port-Eigenschaft und dem Signal, das Sie steuern möchten, anwenden sollten.
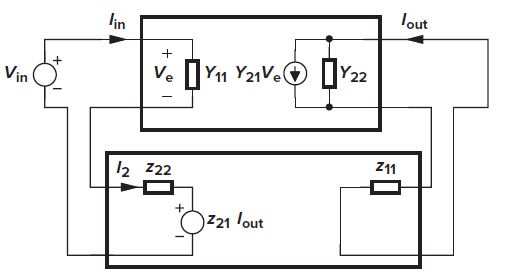
Nun analysieren wir die Spannungs-Spannungs-Rückkopplung erneut mit der Zwei-Port-Modell-Methode.
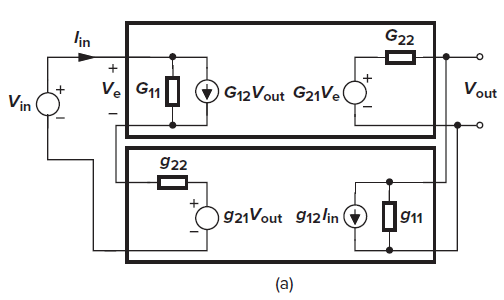
Spannung rein, Spannung raus, also wählen wir das G-Modell. Das vollständige Modell löst das bilaterale Problem. Aber das System wird zu kompliziert, und in den meisten Fällen haben diese Pfade keine Auswirkungen. Daher ignorieren wir zur Vereinfachung die bilateralen Terme
Dann listen wir die Gleichungen auf:
Lösen Sie sie auf:
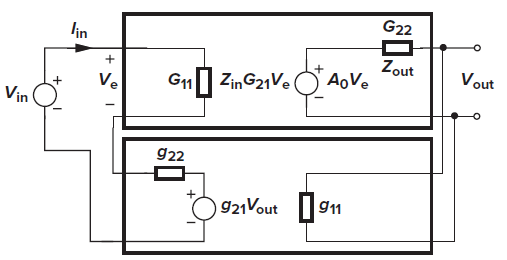
Wenn wir die Parameter mit physikalischen Größen in der primären Theorie korrespondieren, erhalten wir eine Zuordnungstabelle:
Die verbleibenden Terme,
Wenn Sie die geschlossene Schleifenverstärkung neu schreiben, finden Sie die Open-Loop-Verstärkungsänderung, die durch die Rückkopplungsleckage verursacht wird:
Offensichtlich:
Übrigens, da das G-Modell ergibt:
Um also den Effekt des Rückkopplungsnetzwerks zu berechnen, können wir die Schleife wie folgt unterbrechen:
Diese Abbildung steht für den Dämpfungsfaktor
Nehmen Sie das folgende Beispiel:
Wir können es im Zwei-Port-Diagramm klarer sehen.
Berechnen Sie die Ein- und Ausgangsimpedanz des Rückkopplungsnetzwerks, dann wissen Sie, wie Sie die Schleife unterbrechen. Das Endergebnis ist:
Für andere Topologien kann die gleiche Analyse angewendet werden. Wir listen die Modelle und Ergebnisse in den folgenden Bereichen dieses Abschnitts auf. Beachten Sie jedoch, dass die Modellauswahl nicht eindeutig ist. Die Spannungs-Spannungs-Topologie kann auch ein H-Modell und ein G-Modell verwenden, da die Impedanzen endlich sind. Es gibt keine eindeutige Antwort für die Auswahl, nur die am besten geeignete.
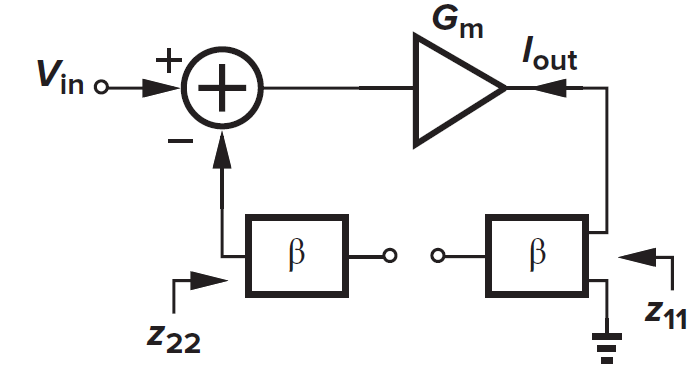
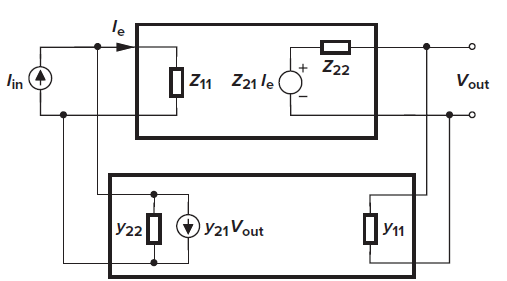
Strom-Spannungs-Rückkopplung
Beachten Sie, dass in dieser Topologie die Verstärkung als Transkonduktanz dimensionsbehaftet ist, da sie Spannung abtastet und Strom ausgibt. Daher ist
Open Loop
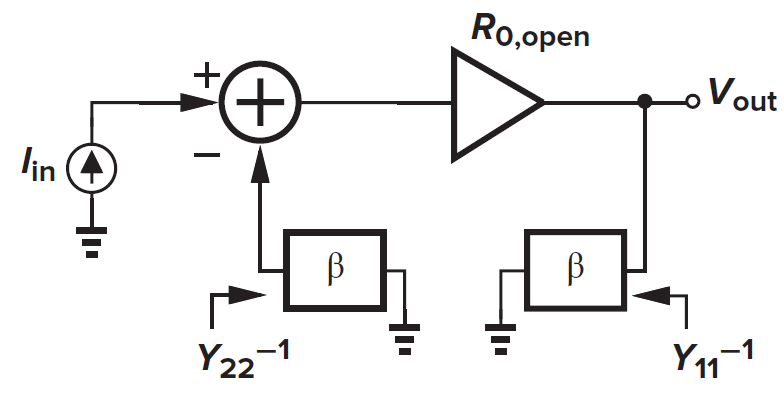
Spannungs-Strom-Rückkopplung
Auch die Verstärkung und der Rückkopplungskoeffizient sind dimensionsbehaftet.
Open Loop
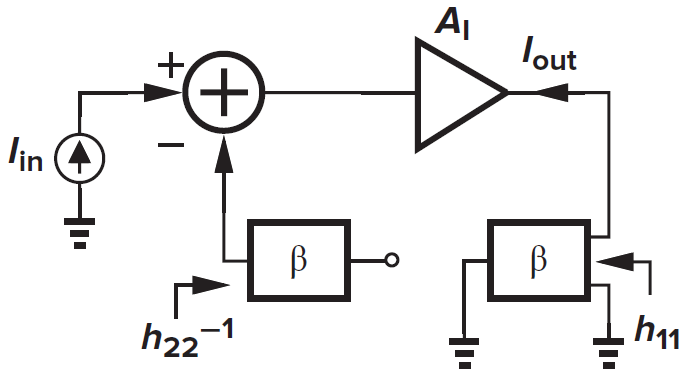
Strom-Strom-Rückkopplung
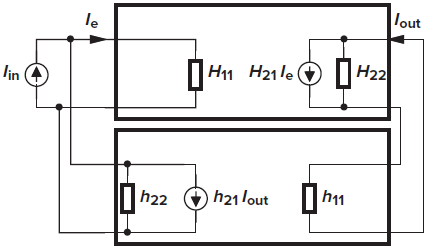
Open Loop
7.4 Bodes Methode und Blackmans Impedanzsatz
Die Zwei-Port-Modellmethode kann immer noch nicht mit nicht-kanonischen Rückkopplungsarten wie der Source-Degenerated CS-Stufe umgehen, da sie den Rückkopplungsprozess immer noch in einen Vorwärtsverstärker und ein Rückkopplungsnetzwerk zerlegt. Im Gegensatz dazu zerlegt Bodes Methode die Rückkopplung nicht als Schleife. Stattdessen betrachtet sie die gesamte Schaltung als Zwei-Port-Schaltung (die Schaltung muss keine Rückkopplung enthalten) und wählt dann einen Port innerhalb der Schaltung:
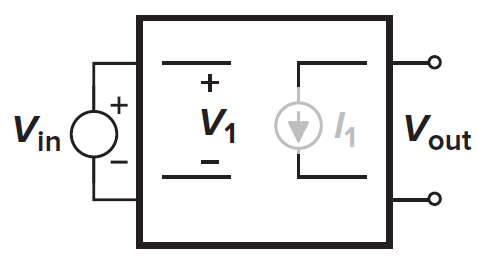
Da die Schaltung linear ist, können alle Variablen als lineare Kombinationen anderer Variablen ausgedrückt werden. Wenn das Eingangssignal ein Spannungssignal ist (zum Beispiel), müssen die beiden Gleichungen gelten
Um ein bestimmtes Verhalten zu erzwingen, erfordert die Schaltung eine externe Verbindung. In typischen MOSFET-Schaltungen ist die Verbindung normalerweise
Es scheint sinnlos, an diesen undefinierten Koeffizienten zu arbeiten, um ein gelöstes Problem zu berechnen. Was ist also der Vorteil, sich diese “neue” Methode auszudenken? Wir sollten zuerst über die physikalische Bedeutung der vier Koeffizienten nachdenken.
Der erste Koeffizient,
In einer traditionellen Rückkopplungsschleife absorbiert das Rückkopplungsnetzwerk keinen Strom, also
Ähnlich gilt:
Sie zeigen nur den Einfluss einer Variablen auf eine andere. Sie können nicht als Vorwärtsverstärkung, Rückkopplung oder andere unabhängige Prozesse zerlegt werden. Mit anderen Worten, das Wesen der Bodeschen Methode ist es, die Schaltung zu “black-boxen” und sie mit vier Koeffizienten zu beschreiben.
Betrachten wir ein Beispiel
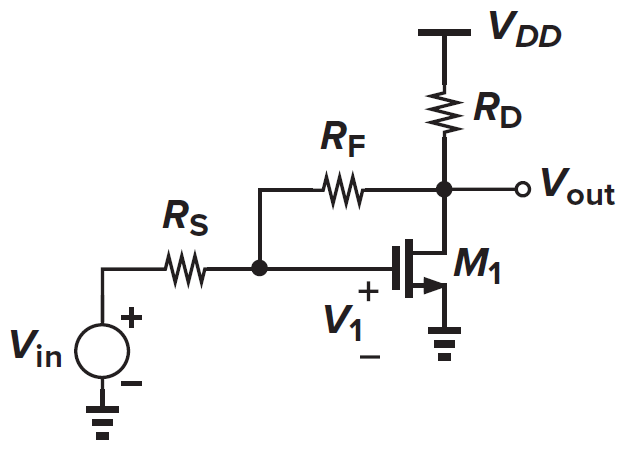
Im Allgemeinen nehmen wir die Gate-Source-Spannung als
Denken Sie daran, die entsprechende Variable bei der Berechnung zu deaktivieren.
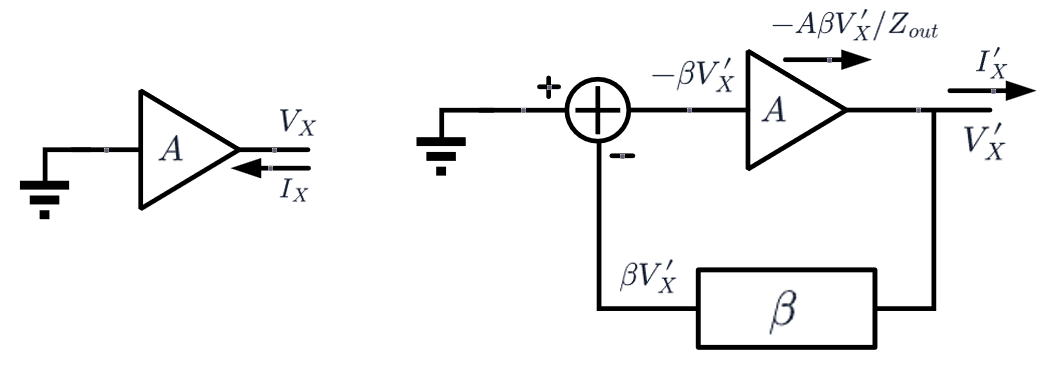
Die wichtigste Anwendung ist die Ableitung des Blackmanschen Impedanzsatzes. Die Schaltung ist immer noch eine Blackbox, aber der Ausgangsport ist deaktiviert. Stattdessen dient der ursprüngliche Eingangsport als “Ausgangsport”.
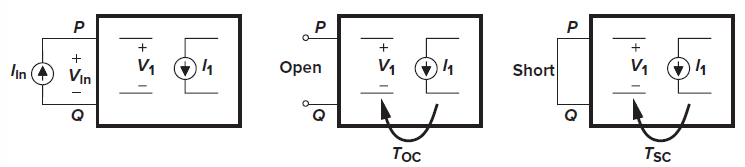
Wir führen zunächst eine Größe namens Rückkopplungsverhältnis ein. In der “black-boxten” Schaltung, da keine Schleife zerlegt wird, wird das ursprüngliche Konzept “Schleifenverstärkung” bedeutungslos. Stattdessen verwenden wir ein ähnliches Konzept namens Rückkopplungsverhältnis: Das Rückkopplungsverhältnis beschreibt, wie stark ein Signal verstärkt oder gedämpft wird, wenn wir ein Signal an einen Port einspeisen, wobei alle unabhängigen Quellen deaktiviert sind (wenn die Frequenz relevant ist, gibt es auch Phasenübergänge).
Nun wählen wir in der obigen Abbildung die Bodeschen Gleichungen wie folgt:
Wir können die Open-Loop-Impedanz berechnen, wenn
Diese Open-Loop-Impedanz wird ohne den Rückkopplungsprozess erhalten. Dann aktivieren wir die Rückkopplung und berechnen die gesamte Closed-Loop-Impedanz
Nun lassen wir den Eingangsport offen, also
Dann erhalten wir mit der externen Verbindung
Um die Ausdrücke zu vereinfachen, nehmen wir an, dass alle vier Koeffizienten positiv sind und diese Schaltung eine negative Rückkopplung anwendet. Dann ist das Rückkopplungsverhältnis bei offenem Eingangsport
Zweitens schließen wir den Eingangsport kurz. Unter dieser Bedingung erhalten wir
und das Rückkopplungsverhältnis bei kurzgeschlossenem Port ist
Vergleichen und schreiben Sie nun den Ausdruck für die Closed-Loop-Impedanz um
Diese Gleichung wird als Blackmanscher Impedanzsatz bezeichnet.