环路分析 - 以跨阻放大器为例

版权声明:
本文采用 CC BY-NC-SA 4.0 许可。
许可信息:
- 标题:环路分析 - 以跨阻放大器为例
- 作者:EleCannonic
- 链接:https://elecannonic.com/zh/categories/电子工程/环路分析/
严禁将本文内容用于商业用途。有关许可政策的更多详情,请访问 关于 页面。
1. 放大器中的不稳定性
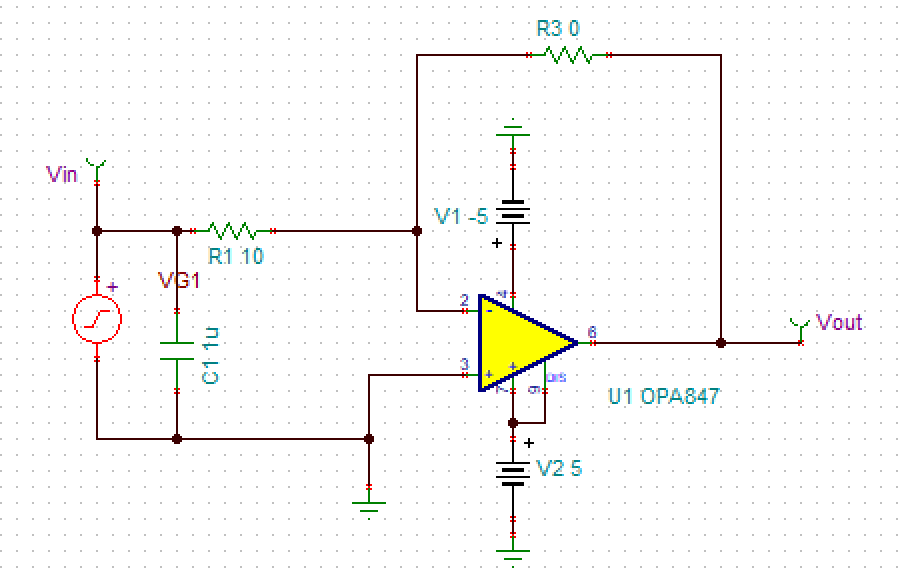
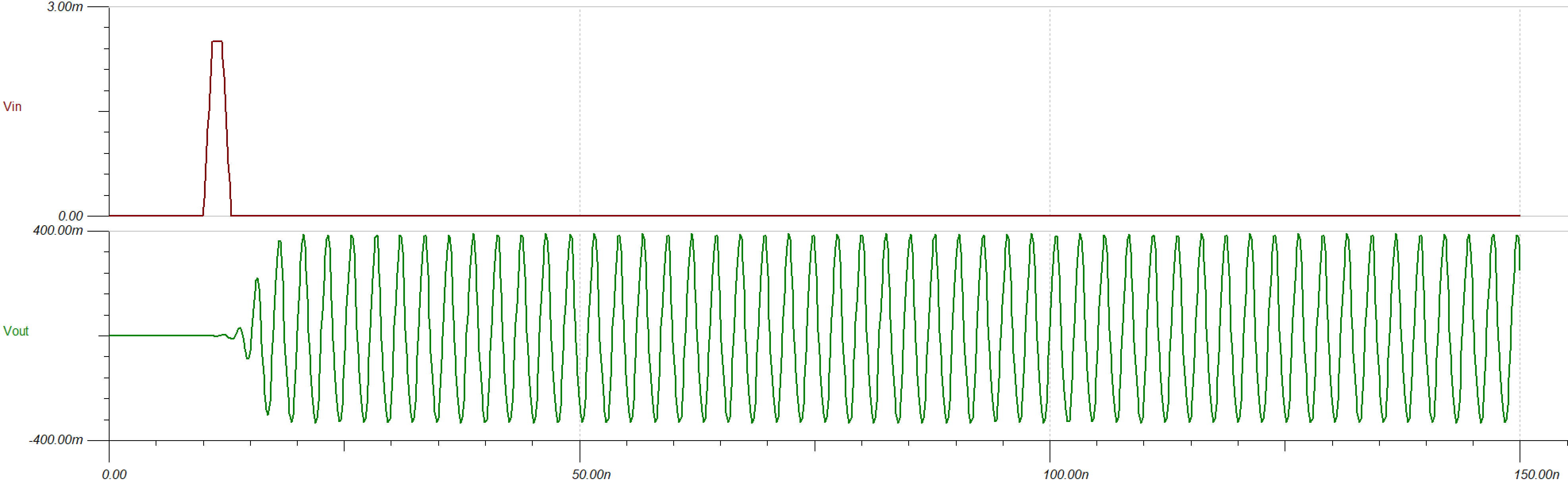
在模拟电子课程中,我们学过一些放大器系统,如反比例转换器、模拟积分器等。老师一定提到过“反馈”,并告诉你反馈在放大系统中是为了将差分信号限制在线性区域内。然而,当你在现实中构建一个放大系统时,尤其是在高频情况下,你可能会遇到一个非常恼人的现象:振荡。在振荡的放大系统中,即使你在输入端没有施加任何信号,示波器也能在输出端检测到信号,且幅度不可忽略。通常,输出是一个正弦波。这种现象称为“自激振荡”。
你可以在 TINA TI 模拟器中看到它。
这种现象表明,必须考虑更多的非理想效应。在实践中,我们应该分析传递函数,并用额外的元件对其进行修改。
2. 振荡条件
我们知道运算放大器具有很大的开环增益。因此,引入反馈来配置所需的增益。通常,一个运算放大器系统可以分解为两部分:增益网络和反馈网络。
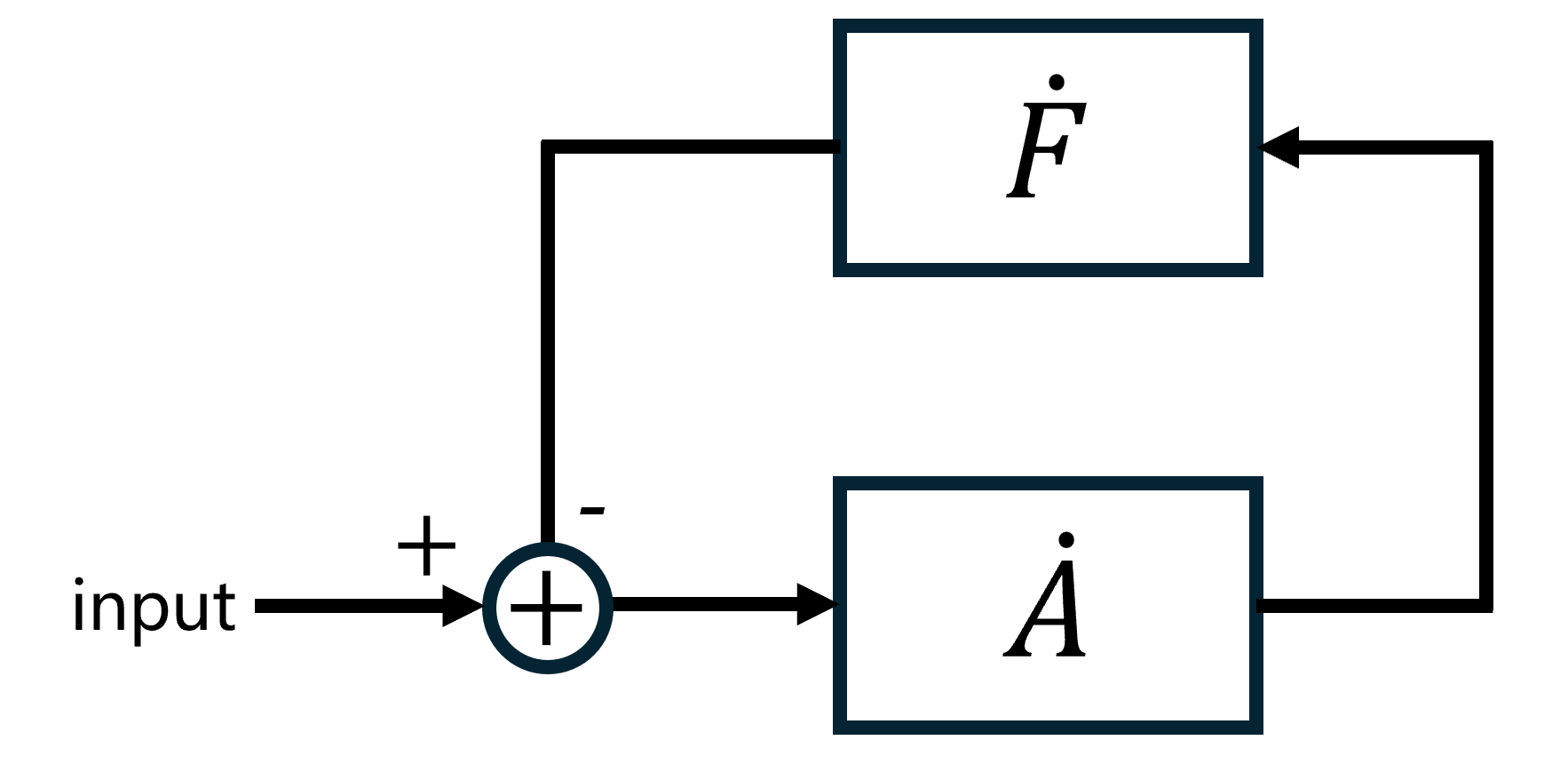
现在我们来明确信号路径:一个只包含一个频率分量
然后它进入反馈网络,被缩放
这个信号将被从新的输入中减去,并重新进入环路,重复整个过程。现在我们假设原始输入是一个理想脉冲,这意味着当信号完成一个周期时,新的输入是 0。通常,新的输入是
如果
但在工程中,网络参数不可能如此精确。实际上,幅度通常满足
因此,要避免振荡,我们必须违反巴克豪森准则。在
3. 非理想效应
3.1 运算放大器内部的极点
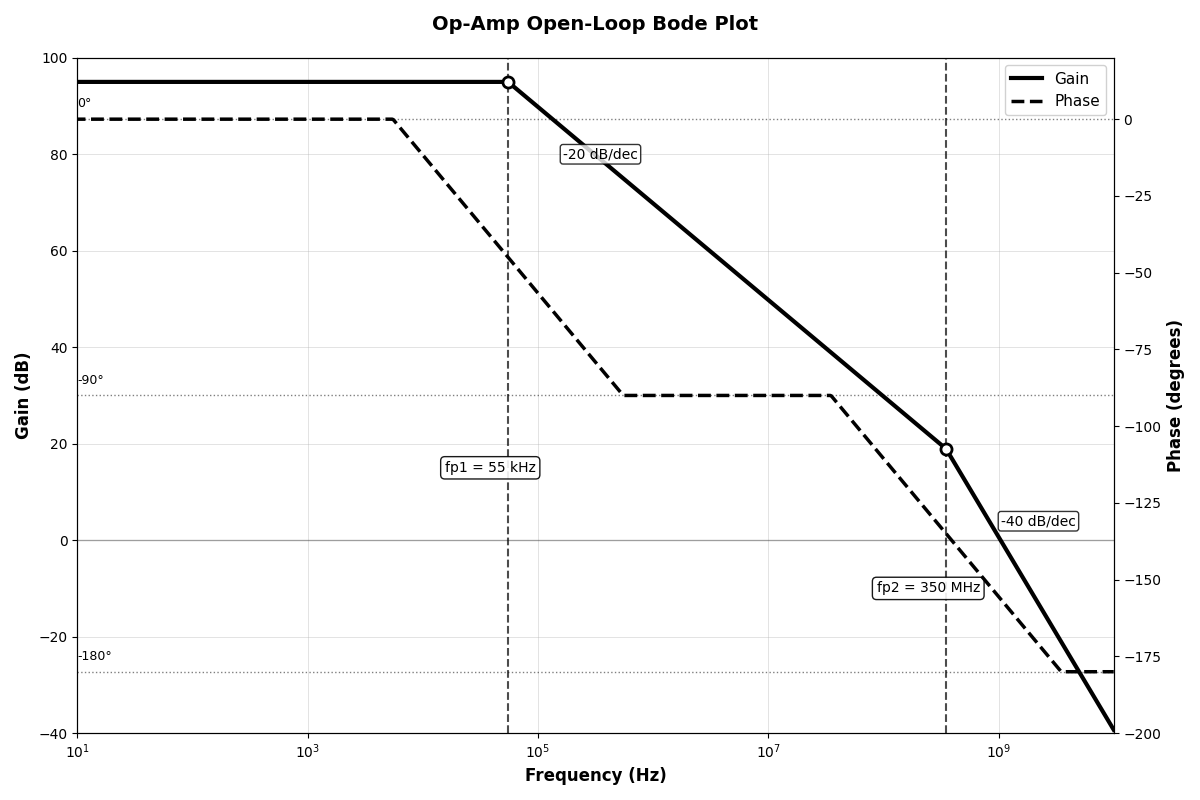
在工程中,运算放大器显然不是理想的。运算放大器由电阻、电容和 MOSFET 等基本元件组成。这些基本元件以及寄生参数,使得运算放大器本身具有多个极点。目前市面上的运算放大器工作在 GHz 级别。在这个频率范围内,我们通常考虑两个极点。第一个(频率较低的)称为主导极点,第二个则称为二阶极点。考虑到运算放大器中的极点,开环增益成为频率的函数。
其中
开环增益为
因此,随着频率的增加,增益衰减,相位移逐渐达到
显然,当频率增加 10 倍时,开环增益减小 20 dB,表示为 -20dB/dec 的衰减。这意味着一个极点最多会导致幅度衰减 -20dB/dec 和 -90° 的相位移。在极点频率处,幅度为 -3dB(
当你在较高频率遇到二阶极点时,它会带来相同的影响。与原始的 -20dB/dec 和 -90° 相移一起,二阶极点使增益恶化到 -40dB/dec 和 -180° 相移。
通常,制造商会在数据手册中提供幅度/相位-频率曲线。你可以在上面清楚地看到两个极点。
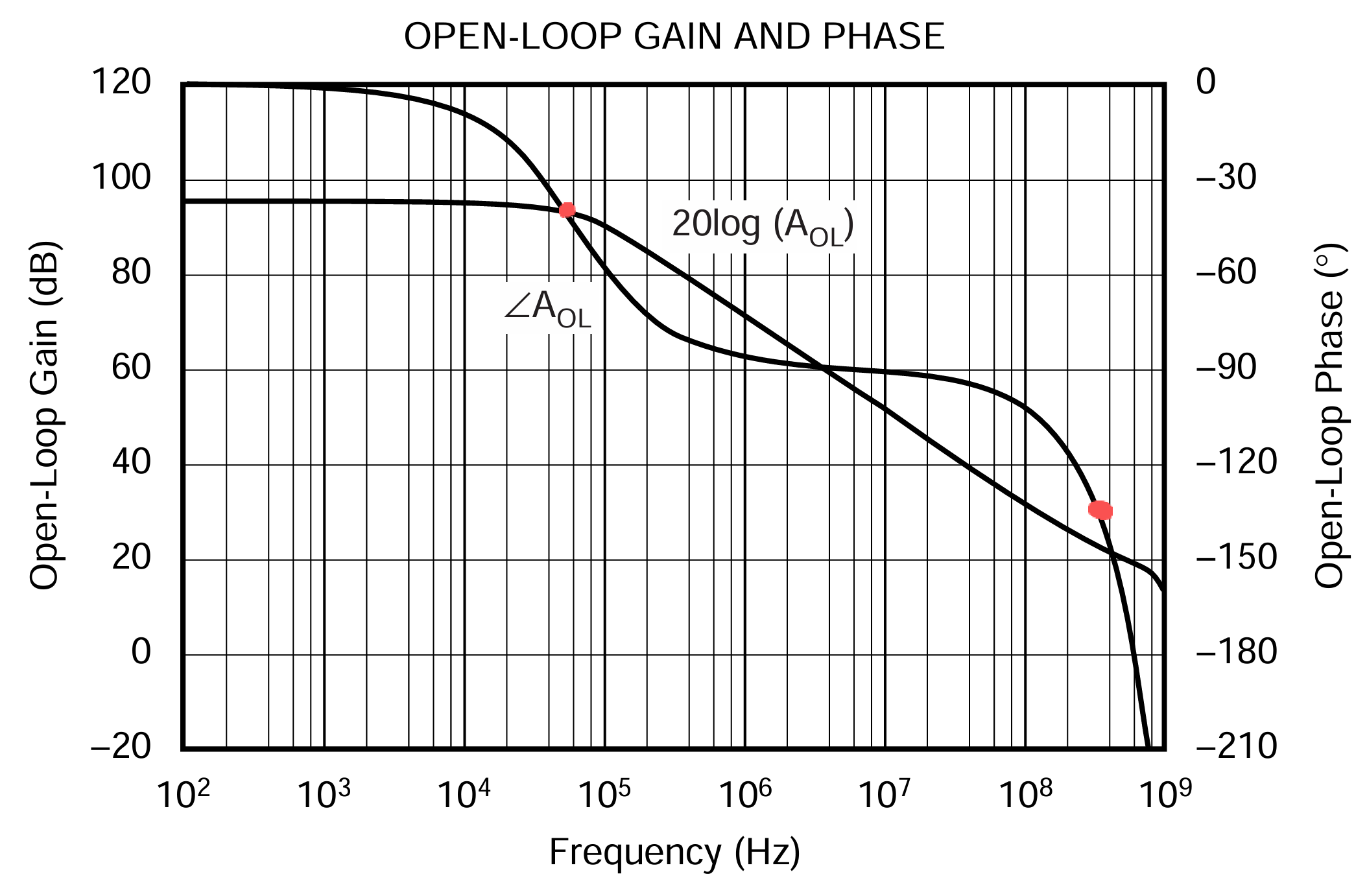
这个图称为波特图。
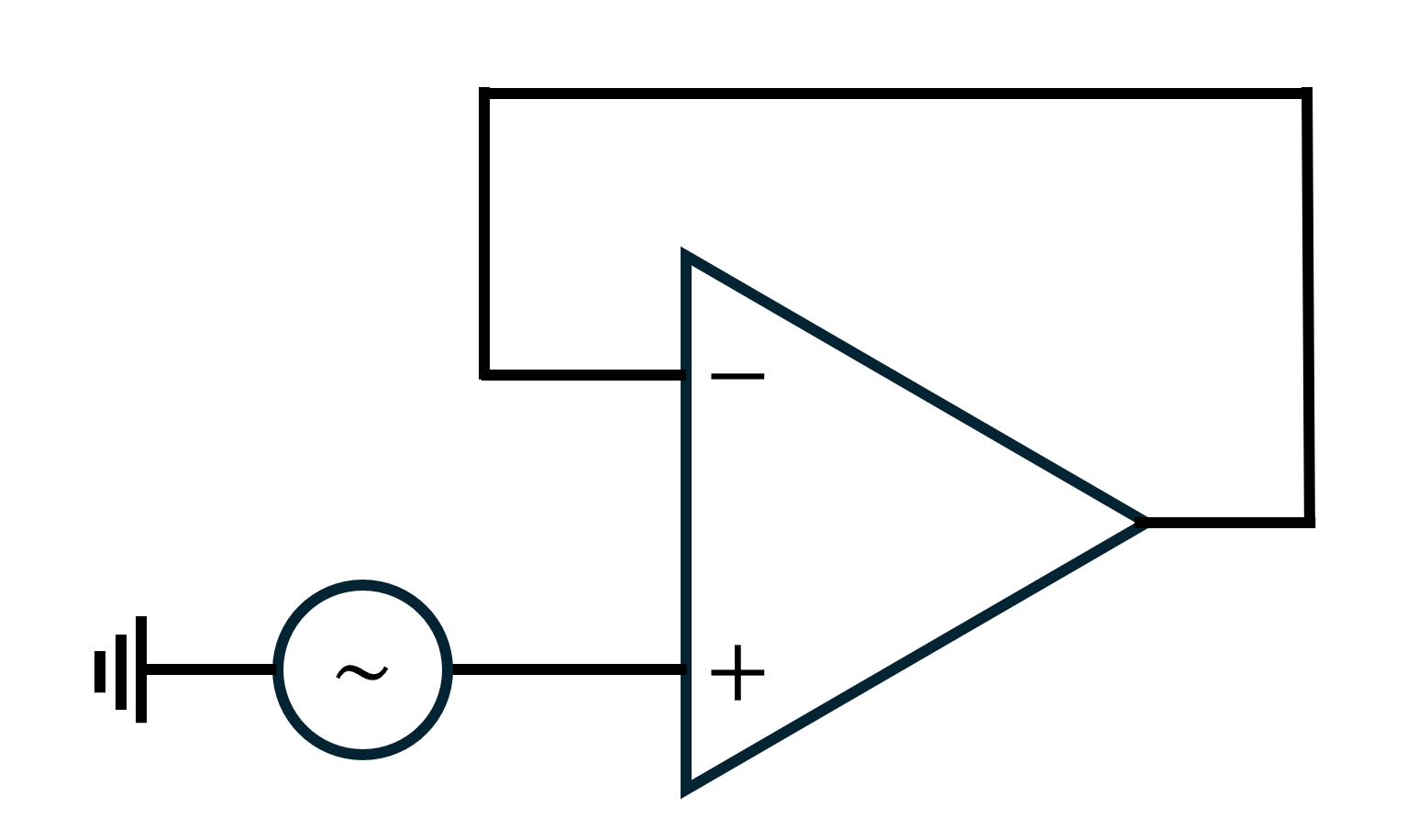
3.2 单位增益稳定性
并非所有运算放大器都是单位增益稳定的。我的意思是,如果你将总增益配置为 1(跟随器),无论你采取何种测量来防止它,它都必须振荡。为什么?以同相跟随器为例。假设运算放大器是 OPA847,上一节中的波特图
考虑一个单频信号,
- 从反相端进入运算放大器,幅度 20dB,相位移 -180°-180°=-360°(“反相”引起的额外 -180°)
- 返回到反相端,幅度 20dB,相位移 -360°
- 重复这些步骤
当测试信号返回到反相端时,其相位恢复到原始状态,形成正反馈。此外,20dB > 0,因此幅度增加。根据巴克豪森准则,它必须振荡。
然后考虑一个更通用的放大器
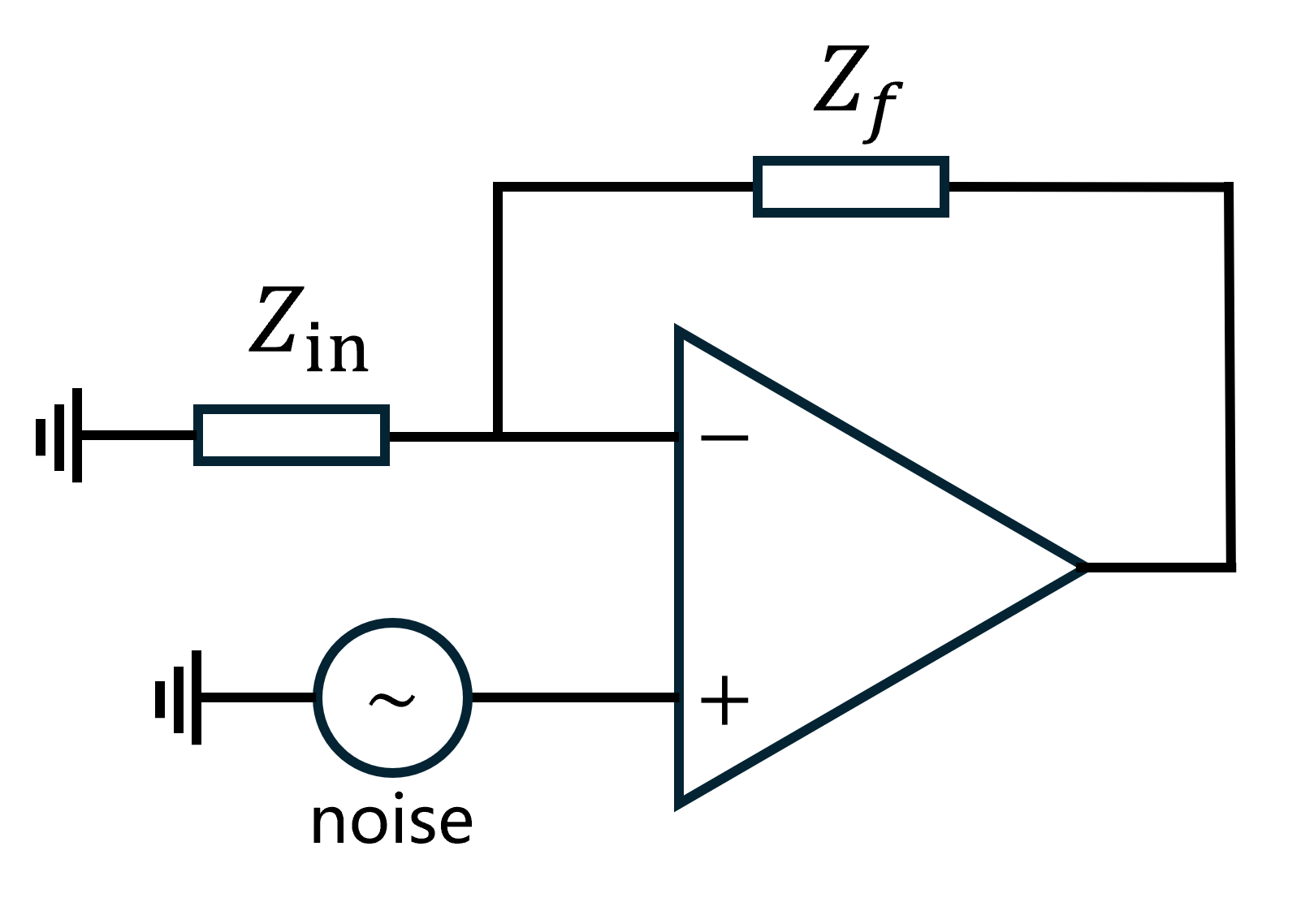
我们将所有噪声等效到同相端,没有其他源。显然,输出完全由噪声引起,噪声增益为
实际上,
环路增益(不是总增益
因此,在波特图中,环路增益等于开环增益减去噪声增益。稳定性的关键是在交叉频率
你可能会发现运算放大器数据手册中有一个增益要求。例如,OPA847 要求增益至少为 12 V/V。这意味着,在总增益大于 12 V/V 时,相位裕度为正。
我们有两种方法来判断运算放大器是否是单位增益稳定的:
- 在相位移 = -180° 的频率处,如果开环增益大于 0dB,则不是单位增益稳定的。
- 在开环增益 = 0dB 的频率处,如果相位移小于 -180°(例如 -210°),则不是单位增益稳定的。
你不需要计算
3.3 输入阻抗
输入端也不是理想的。对于运算放大器本身,存在一个差分电容
4. 反馈补偿
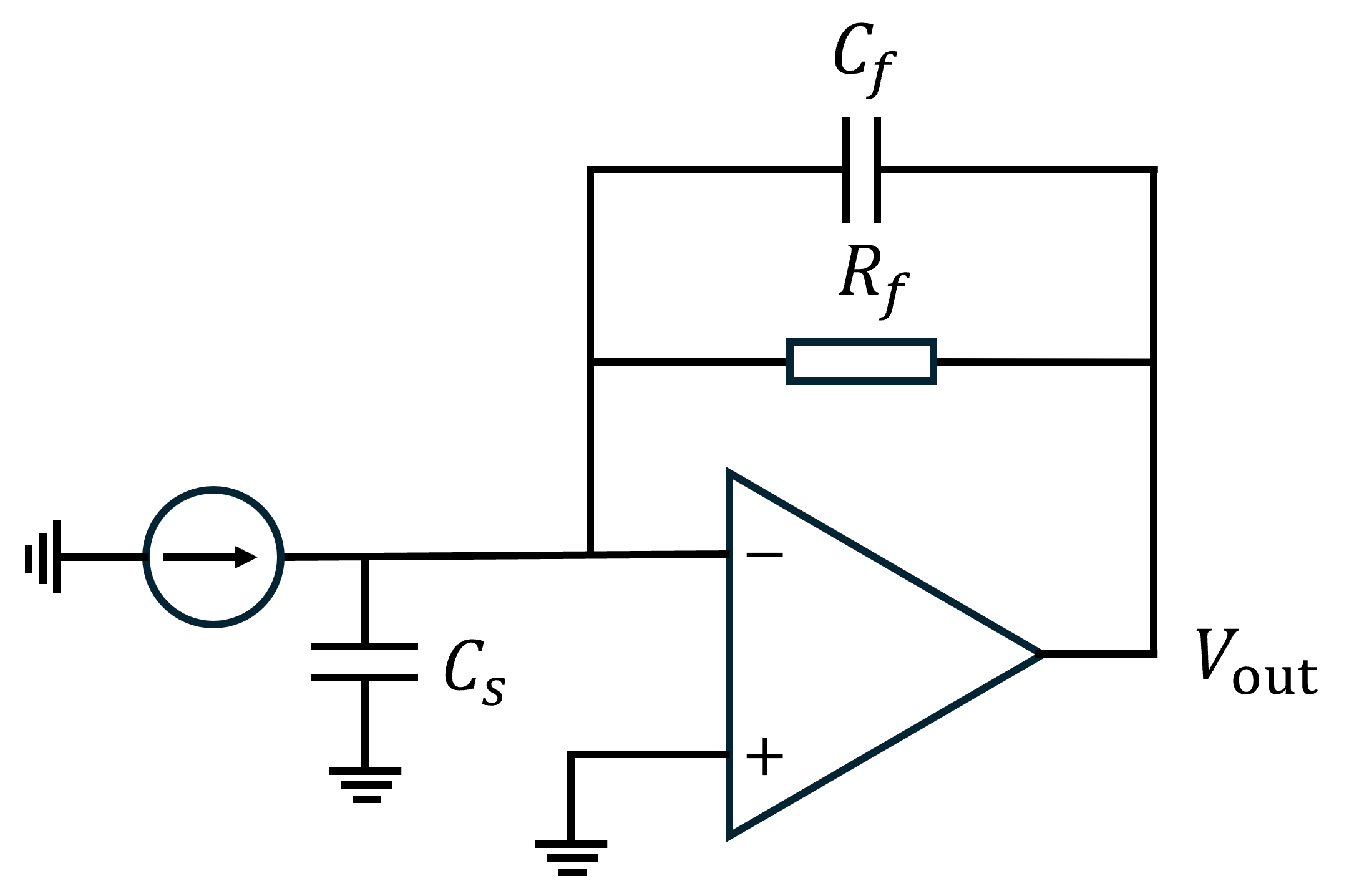
4.1 跨阻放大器 (TIA)
跨阻放大器是一种将电流信号转换为电压信号的放大系统。它广泛用于光电检测。基本的反相配置如下。
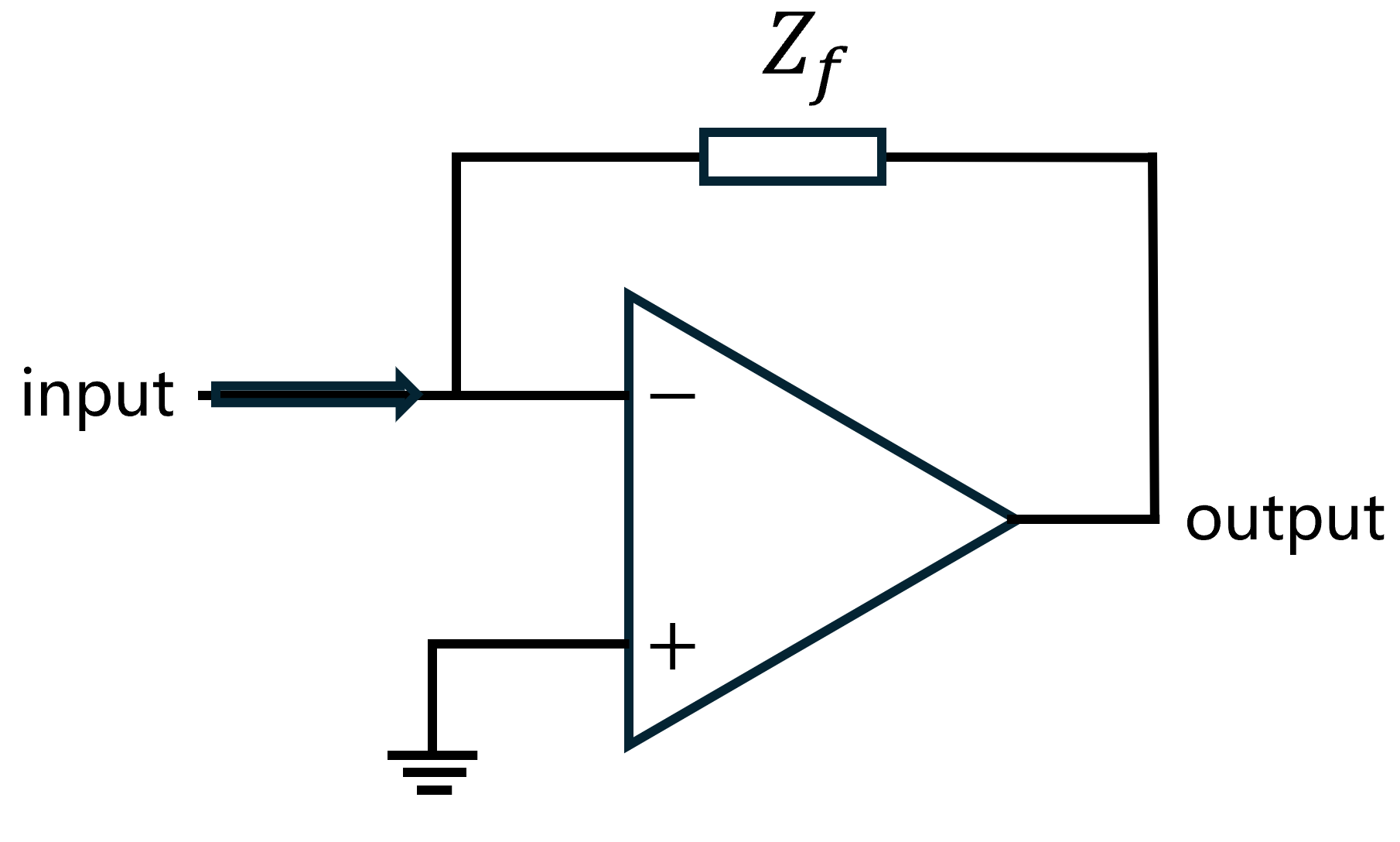
理想情况下,输出为
假设
反馈系数为
假设
噪声增益
我们通常将烦人的曲线简化为折线。在极点和零点处折断。
添加噪声增益曲线。(零点效应与极点效应相反。零点引入 +45°,最终 +90° 相移和 +20dB/dec 的幅度增加。)
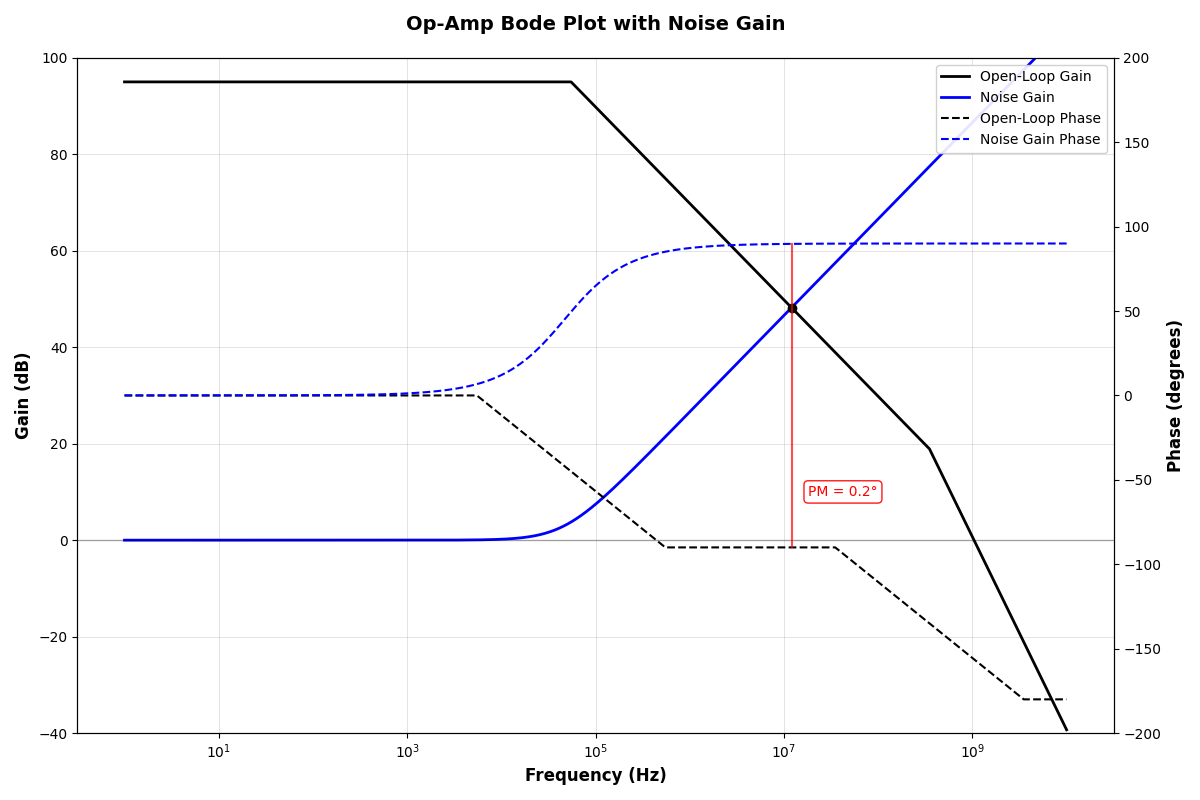
相位裕度是噪声相位移与运算放大器相位移之差,减去 -180°。显然,使用此参数配置,相位裕度仅为 0.2°,这意味着该电路几乎肯定会自激振荡,并且无法正确放大电流信号,尤其是在高频情况下。
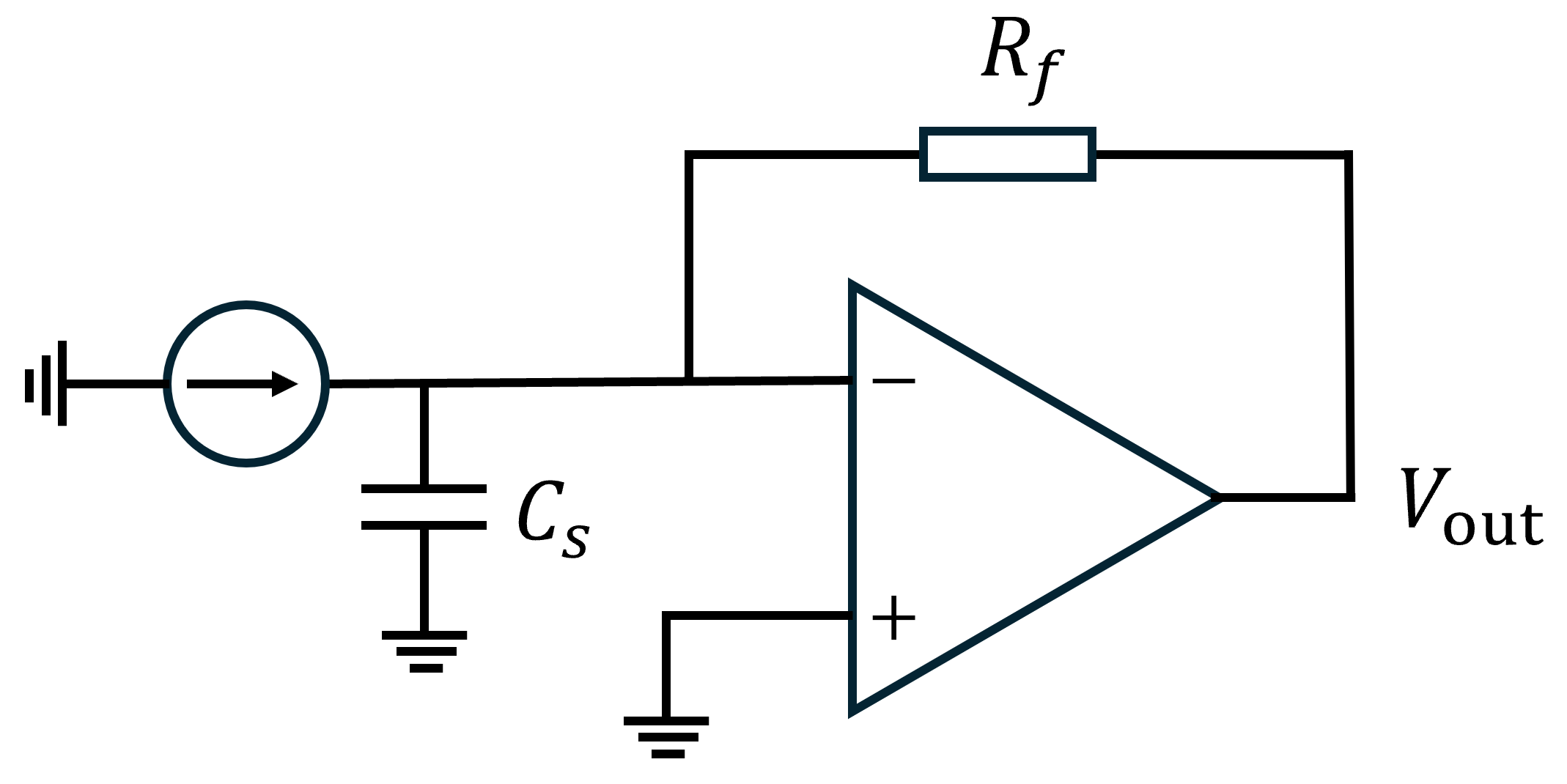
4.2 补偿值计算
为了解决这些问题,我们应该采取一些措施来增加相位裕度。由于运算放大器无法从 PCB 层面进行修改,我们必须修改反馈网络。请注意,相位裕度的恶化是由噪声增益的零点引起的。因此,一个想法是引入一个极点将相位移拉回到 -45°,这样相位裕度就会很好。最简单的方法是在反馈电阻
有了这个补偿,新的
现在引入了一个新的极点。由于在我们的例子中
新曲线变为
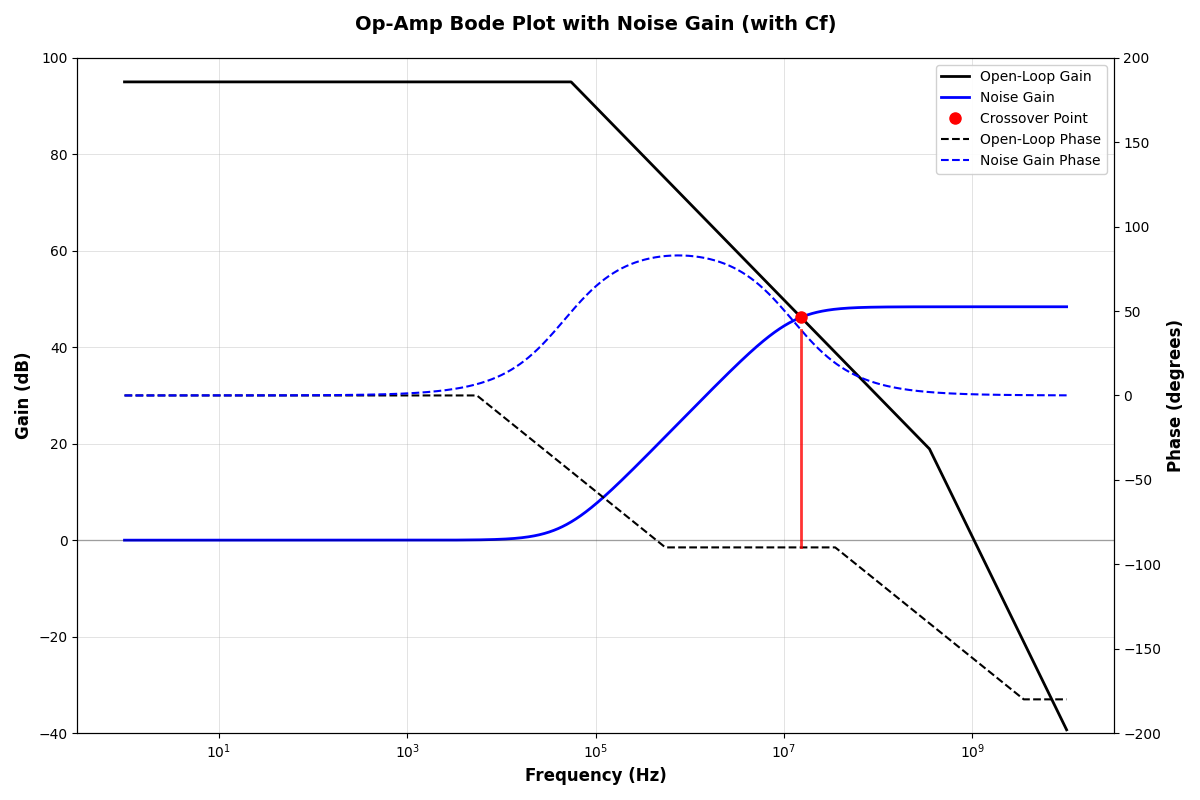
从图中可以看出,为了获得大于 45° 的相位裕度,极点应小于交叉频率。
在低频区域,开环增益可以用增益带宽积 (GBP) 表示
在交叉频率
近似成立是因为
所需的极点为
我们得到
这意味着只有当补偿电容器大于 11.8pF 时,系统才能保持稳定。
另一方面,电容器也不能太大,因为它会影响你的带宽。通常,如果我们需要的带宽是
如果我们需要的带宽是 5MHz,则电容器应为
此外,OPA847 要求增益大于 12 V/V 才能稳定。查看噪声增益曲线。在高频区域,阻抗主要由电容决定。因此,高频增益为
但通常,补偿范围由以下两个不等式确定:
参考文献:
[1] Texas Instruments, Transimpedance Considerations for High-Speed Amplifiers, Application Report SBOA122, Nov. 2009.
[2] S. Cherian, What You Need to Know about Transimpedance Amplifiers - Part 1, Texas Instruments, Technical Article, 2023.
[3] Texas Instruments, Wideband, Ultra-Low Noise, Voltage-Feedback OPERATIONAL AMPLIFIER with Shutdown, Datasheet SBO251E, Dec. 2008
[4] 杨建国,《新概念模拟电路》. [在线]. 亚德诺半导体技术(上海)有限公司授权,2018.